176
Origin Search and Origin Return Functions Section 6-3
being applied, the Positioning Completed Signal is checked after the compen-
sation operation is completed.
Origin Search Operation
Setting
Select either of the following two reverse modes for the origin search opera-
tion at the limit in the origin search direction.
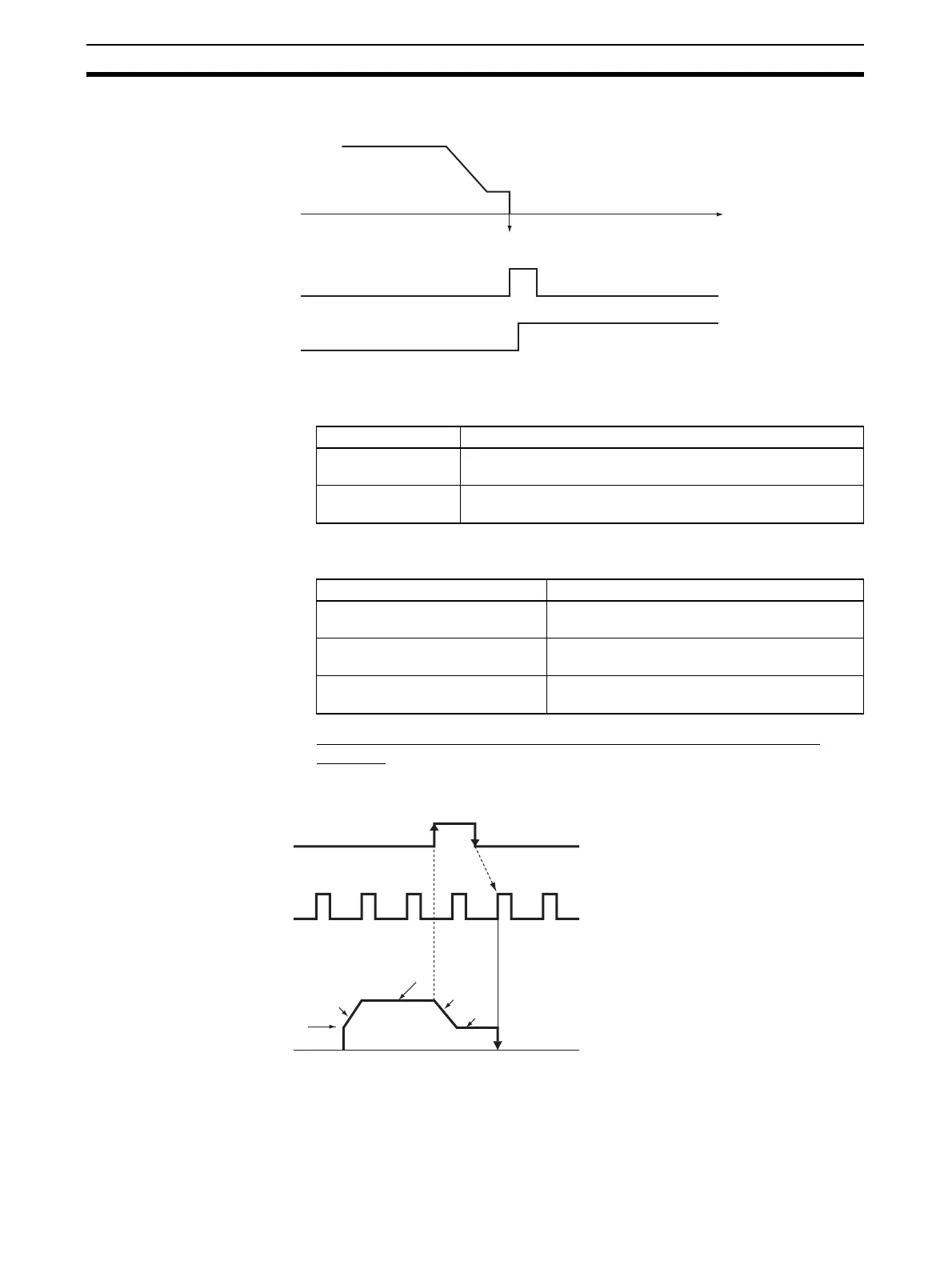
Origin Detection Method Select one of the following methods that specify the treatment of the Origin
Proximity Input Signal.
Origin Detection Method 0: Origin Proximity Input Signal Reversal
Required
1
1
0
0
Pulse output
Error Counter
Reset Output
Positioning
Completed
Si
nal
Stop
Time
Setting Description
0: Reversal mode 1 When the limit input signal is received in the origin search
direction, reverse and continue operation.
1: Reversal mode 2 When the limit input signal is received in the origin search
direction, generate an error and stop operation.
Setting Description
0: Origin Proximity Input Signal
reversal required.
Reads the first Origin Input Signal after the Ori-
gin Proximity Input Signal goes OFF→ON→OFF.
1: Origin Proximity Input Signal
reversal not required.
Reads the first Origin Input Signal after the Ori-
gin Proximity Input Signal goes OFF→ON.
2: Origin Proximity Input Signal not
used.
Just read the Origin Input Signal without using
the Origin Proximity Input Signal.
1
1
0
0
CCW
CW
Origin Proximity
Input Signal
Origin Input
Signal
Pulse output
Deceleration starts when
Origin Proximity Input
Signal goes OFF→ON.
After the Origin Proximity Input Signal has gone
from OFF→ON→OFF, the motor is stopped
when the Origin Input Signal goes OFF→ON.
Initial
speed
Acceleration
High speed for
origin search
Deceler-
ation
Proximity speed for origin search
Start when
ORG(889) is
executed.
Stop
 Loading...
Loading...



