187
Origin Search and Origin Return Functions Section 6-3
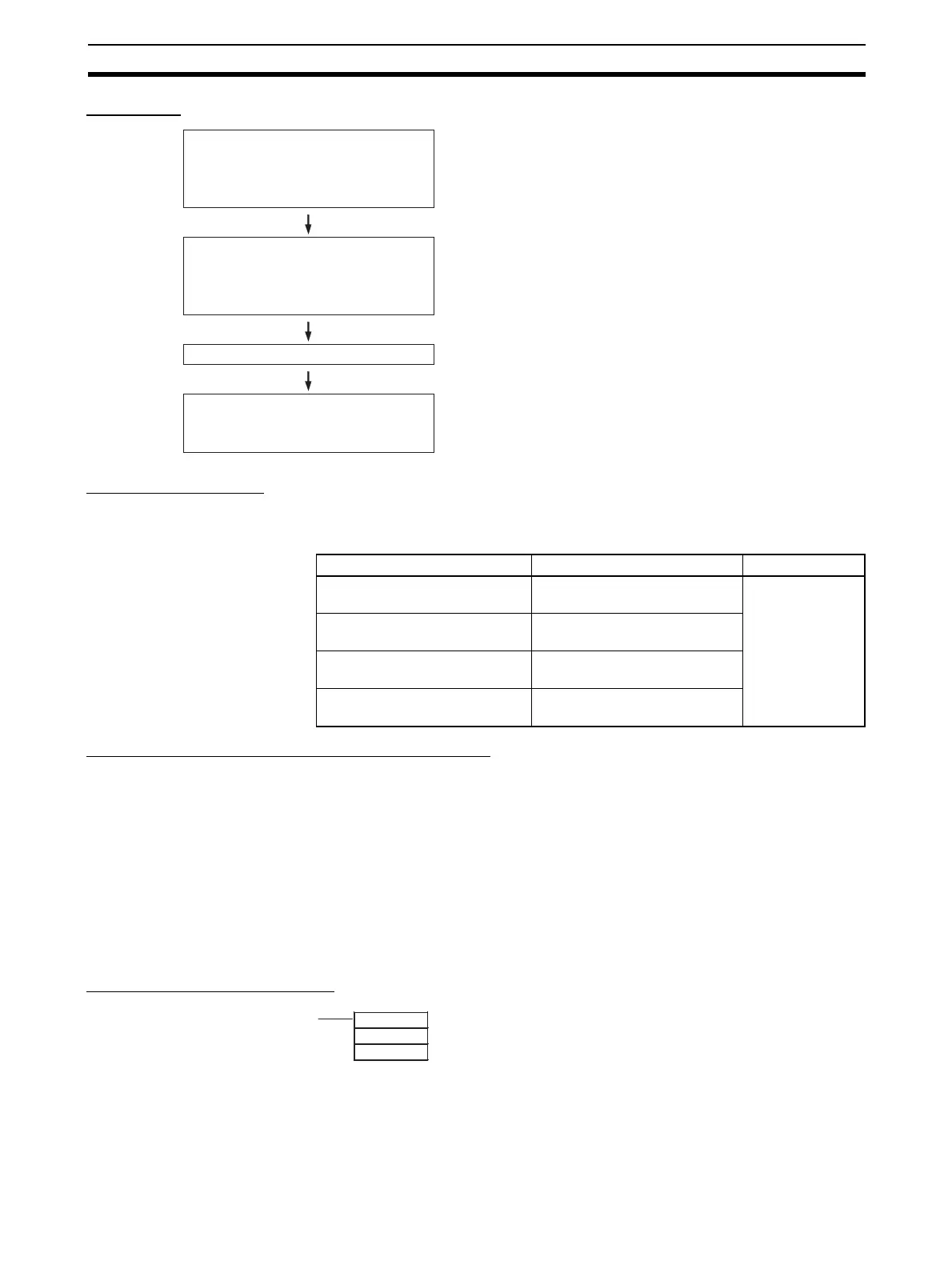
Procedure
PLC Setup Settings
The various origin return parameters are set in the PLC Setup.
Origin Return Parameters
Explanation of the Origin Return Parameters
Origin Search/Return
Initial Speed
Sets the motor's starting speed when the origin return is executed. Specify
the speed in the number of pulses per second (pps).
Origin Return Target
Speed
Sets the motor's target speed when the origin return is executed. Specify the
speed in the number of pulses per second (pps).
Origin Return
Acceleration Rate
Sets the motor's acceleration rate when the origin return operation starts.
Specify the amount to increase the speed (Hz) per 4-ms interval.
Origin Return
Deceleration Rate
Sets the motor's acceleration rate when the origin return function is decelerat-
ing. Specify the amount to decrease the speed (Hz) per 4-ms interval.
Executing an Origin Return
Note An instruction execution error will occur if the origin is not determined (relative
coordinate system) when ORG(889) is executed to perform an origin return
operation.
1. Starting Speed for Origin Search and Origin Return
2. Origin return target speed
3. Origin return acceleration rate
4. Origin return deceleration rate
• Outputs: Use either the CW/CCW method or Pulse +
direction method. The same method must be used
for both pulse output 0 and pulse output 1.
Power supply for outputs: 24 V DC
• Various origin return parameter settings
(See table below.)
• Execution of ORG(889)
To specify the origin return operation, set bits 12
to 15 of the second operand to 1 hex.
Determine the origin return parameters.
Wire the outputs.
PLC Setup settings
Ladder program
Name Settings Remarks
Origin search/return initial
speed
00000000 to 000186A0 hex
(0 to 100,000 pps)
Start of operation
Origin return target speed 00000000 to 000186A0 hex
(0 to 100,000 pps)
Origin return acceleration rate 0001 to 07D0 hex
(1 to 2,000 Hz/4 ms)
Origin return deceleration rate 0001 to 07D0 hex
(1 to 2,000 Hz/4 ms)
P
C
ORG(889)
P: Port specifier (Pulse output 0: #0000, Pulse output 1: #0001)
C: Control data
(Origin return and CW/CCW method: #1000, Origin search and pulse
+ direction method: #1100)