7 - 23
7 Applied Functions
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
7-7 Force Limit Switching
7
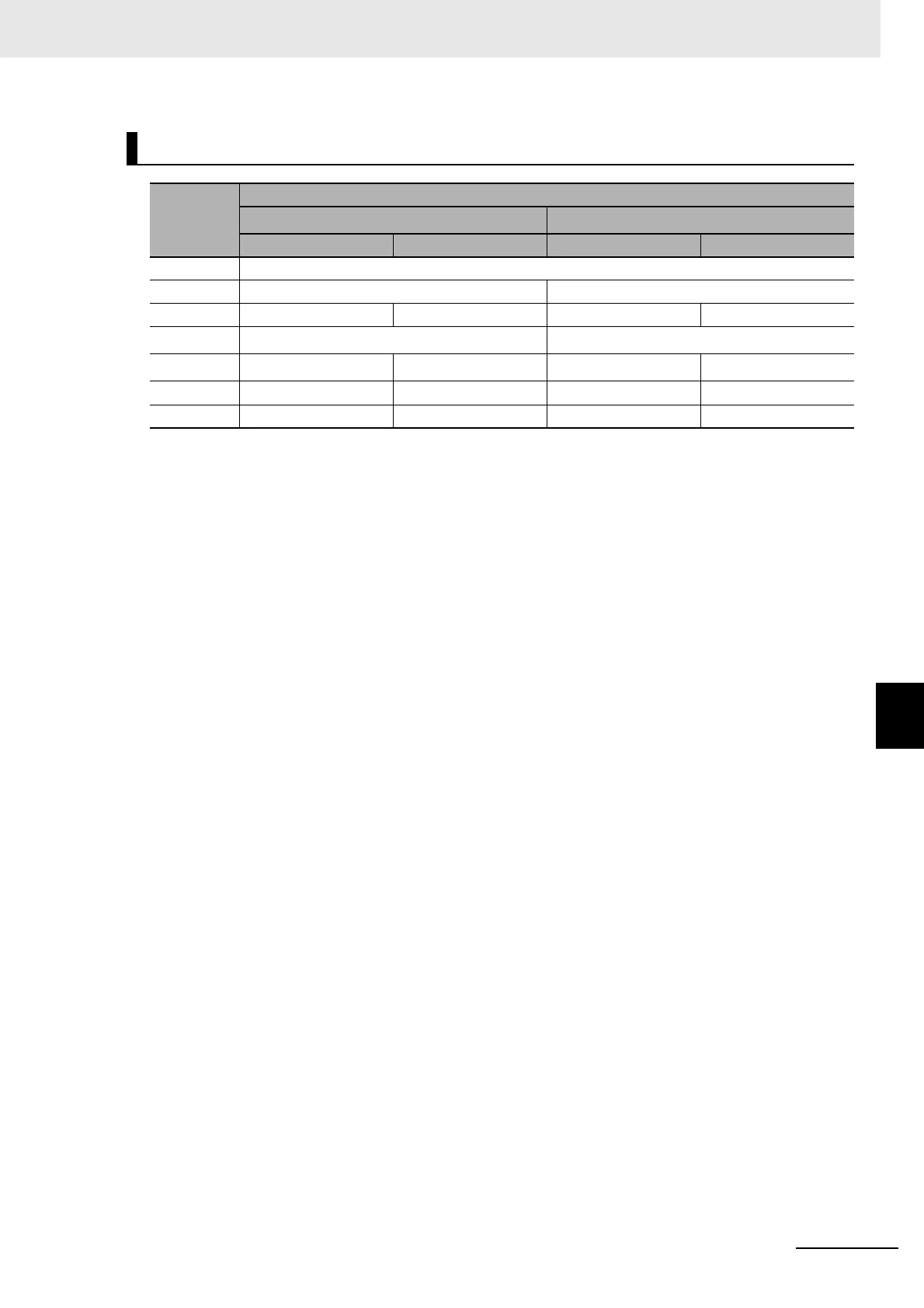
7-7-2 Objects Requiring Settings
*1 PCL ON is the state in which either the Positive Force Limit Input (PCL) or the EtherCAT communications
torque control command (P-CL) is ON; PCL OFF is the state in which both of these are OFF.
*2 NCL ON is the state in which either the Negative Force Limit Input (NCL) or the EtherCAT communications
torque control command (N-CL) is ON; NCL OFF is the state in which both of these are OFF.
*3 The smaller of 60E0 hex or 3013 hex is used.
*4 The smaller of 60E1 hex or 3522 hex is used.
Force Limit in Position, Speed, and Force Controls
3521 hex
set value
Position control/speed control/force control
Positive Direction Force Limit
*1
Negative Direction Force Limit
*2
PCL ON PCL OFF NCL ON NCL OFF
0, 1 3013 hex
2 3013 hex 3522 hex
3 3522 hex 3013 hex 3522 hex 3013 hex
4
60E0 or 3013 hex
*3
60E1 or 3522 hex
*4
5
60E0 or 3013 hex
*3
3013 hex
3
60E1or 3522 hex
*4
3522 hex
3
6 3525 hex
60E0 or 3013 hex
*3
3526 hex
60E1 or 3522 hex
*4
7 3013 hex 3525 hex 3522 hex 3526 hex

 Loading...
Loading...