A - 5
Appendices
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
A-1 CiA402 Drive Profile
A
A-1-3 Communications Cycles and Corresponding Modes of Operation
This section describes the Modes of operation that can be used for each combination of
communications cycle and PDO mapping set in the RxPDO.
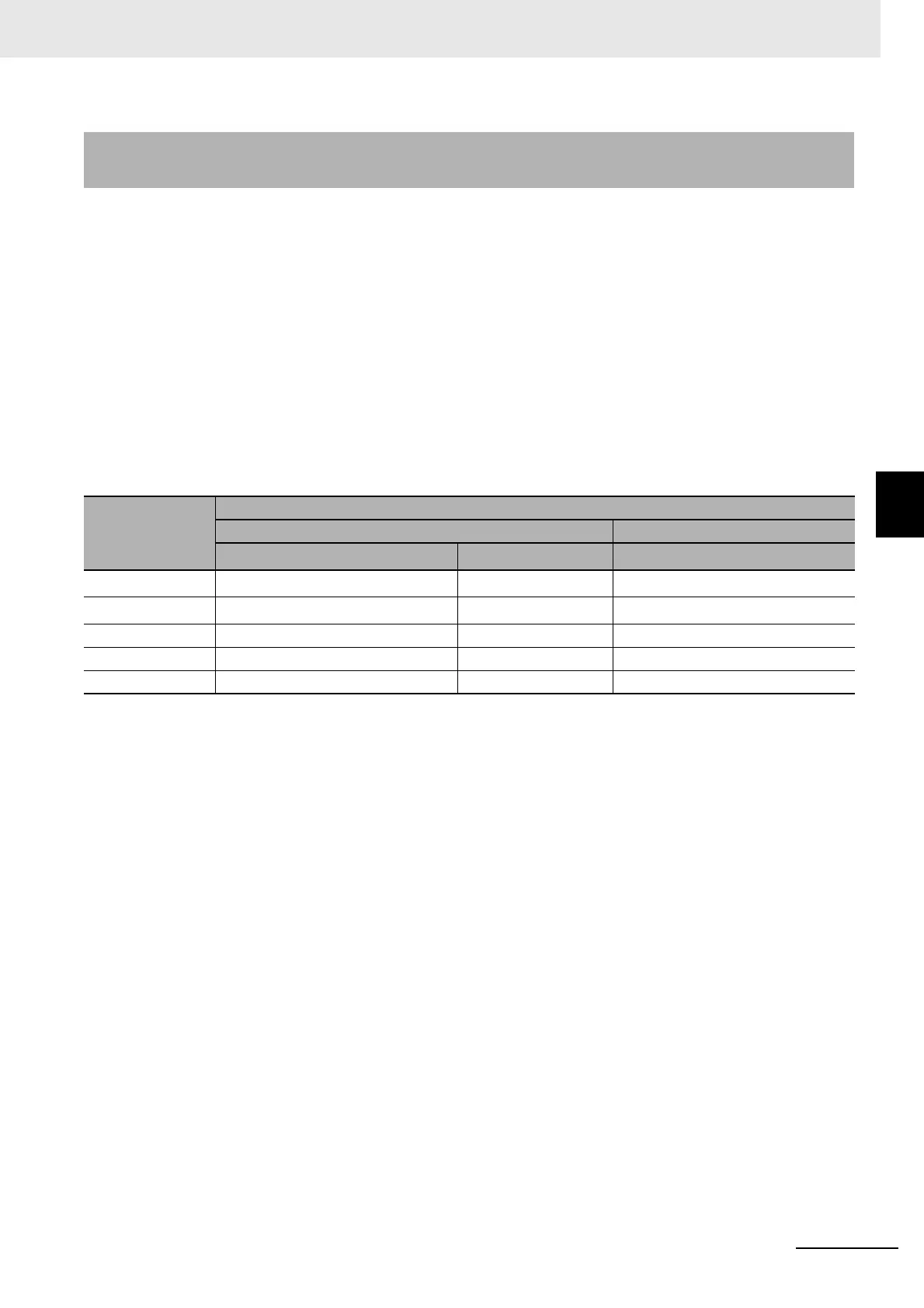
z Position Control
Any of 1701 to 1705 hex or 1600 hex can be set in the RxPDO when 0 to 5 (position control) is set
for the Control Mode Selection (3001 hex). The following table shows the Modes of operation that
can be used for each combination of communications cycle and RxPDO.
When the RxPDO is set to the 1st receive PDO Mapping (1600 hex), the combination of the
communications cycle and the available Modes of operation varies depending on the total size of
mapped objects.
For details on the 1st receive PDO Mapping (1600 hex), refer to 5-4-4 Variable PDO Mapping on
page 5-9.
*1 The communications cycle is set in the controller. Refer to the manual of the controller that is connected for the setting
procedure.
*2 Applicable when the total size of objects mapped to RxPDO is 20 bytes or less.
*3 Applicable when the total size of objects mapped to RxPDO is 21 to 24 bytes.
*4 Applicable when the total size of objects mapped to RxPDO is 24 bytes or less.
*5 The Function Setting Error (Error No. 93.4) will occur if a setting labeled “– (Not supported)” is set.
A-1-3 Communications Cycles and Corresponding Modes of
Operation
Communications
cycle [µs]
*1
RxPDO
When electronic gear ratio is 1:1
When electronic gear ratio is not 1:1
1701, 1702, 1703, 1705, 1600 hex
*2
1704, 1600 hex
*3
1701, 1702, 1703, 1705, 1600 hex
*4
250 csp, csv, cst
–
*5
–
*5
500 csp, csv, cst csp, csv, cst
–
*5
1,000 csp, csv, cst, pp, hm csp, csv, cst, pp, hm csp, csv, cst, pp, hm
2,000 csp, csv, cst, pp, hm csp, csv, cst, pp, hm csp, csv, cst, pp, hm
4,000 csp, csv, cst, pp, hm csp, csv, cst, pp, hm csp, csv, cst, pp, hm

 Loading...
Loading...