7 Applied Functions
7 - 24
G5-series Linear Motors/Servo Drives With Built-in EtherCAT Communications
7-8 Soft Start
This function is used to control the speed. It sets the acceleration and deceleration against the speed
command input in the Servo Drive.
The function can be used for step speed commands, and allows soft starts. The S-curve Acceleration
and Deceleration function is used to reduce any impacts by acceleration changes.
Precautions for Correct UsePrecautions for Correct Use
Do not set the Soft Start Acceleration Time and the Soft Start Deceleration Time when the
position loop structure with a Host Controller is used.
Set the time required for a step speed command to reach the maximum motor speed into the Soft Start
Acceleration Time (3312 hex).
In the same manner, set the time required for the command to decrease the speed from the maximum
motor speed to “0 mm/s” into the Soft Start Deceleration Time (3313 hex).
The time taken for acceleration or deceleration is calculated by the following formula, where Vc [mm/s]
is the target speed of the speed command.
The maximum motor speed is the setting of the Overspeed Level (3910 hex).
7-8-1 Objects Requiring Settings
Index Name Description Reference
3312 hex Soft Start Acceleration or
Time
Sets the acceleration time for the speed command
input.
P. 9-25
3313 hex Soft Start Deceleration
Time
Sets the deceleration time for the speed command
input.
P. 9-25
3314 hex S-curve Acceleration/
Deceleration Time Setting
Sets the acceleration or deceleration processing
S-curve time for the speed command input.
P. 9-26
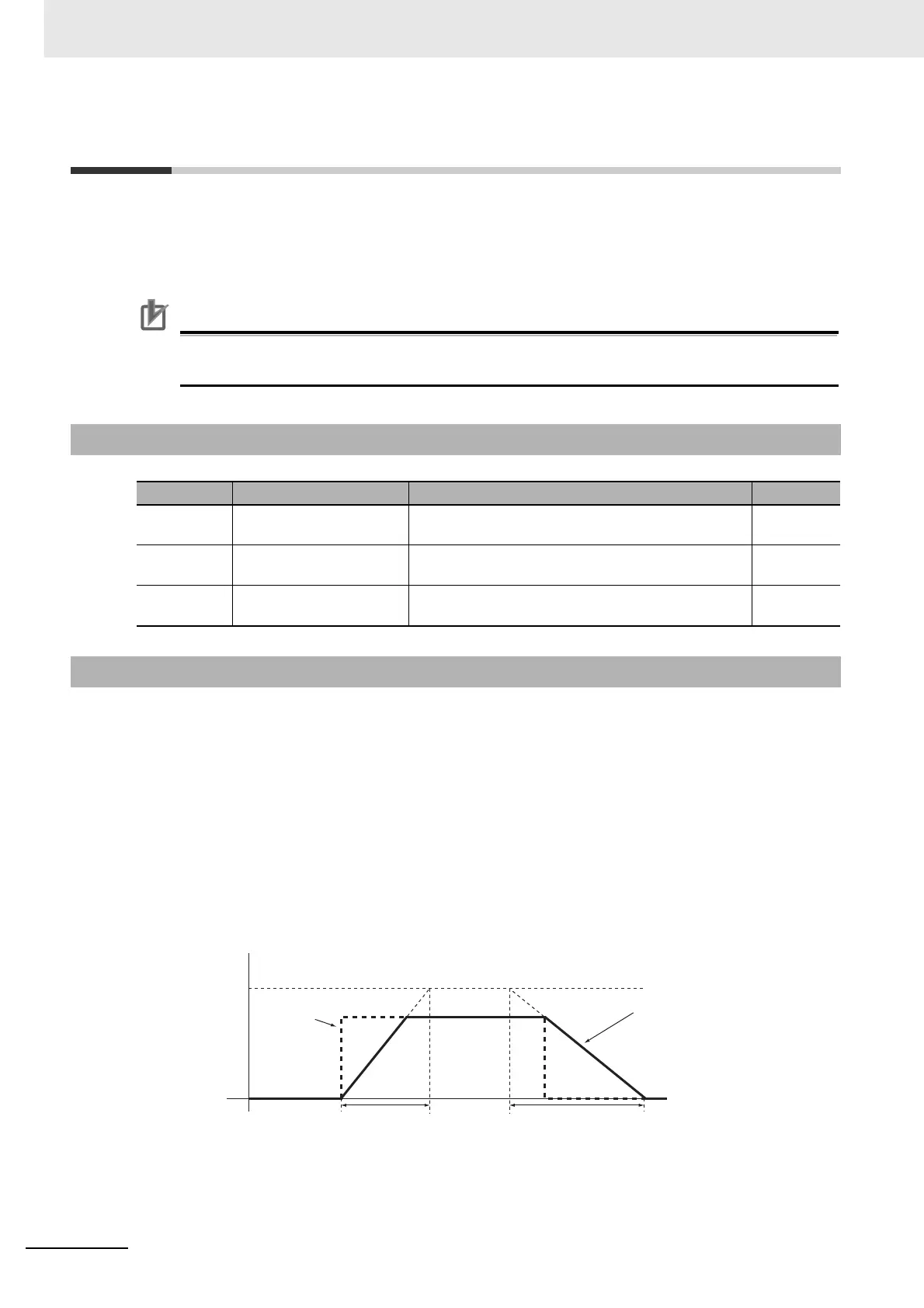
7-8-2 Soft Start Acceleration or Deceleration Time
cceleration Time [ms] = Vc/Maximum motor speed × 3312 hex × 1 ms
Deceleration Time [ms] = Vc/Maximum motor speed × 3313 hex × 1 ms
3312 hex × 1 ms 3313 hex × 1 ms
Speed [mm/s]
Maximum
motor speed
Step input of a speed
command
Speed command
after acceleration or
deceleration processing

 Loading...
Loading...