4-34
4-4 Regenerative Energy Absorption
4
System Design
Since an internal capacitor absorbs regenerative energy, the value for E
g1
a E
g2
(unit: J) must be
lower than the Servo Drive’s regenerative energy absorption capacity. (For details, refer to Servo
Drive Regenerative Energy Absorption Capacity on page 4-35.) If an External Regeneration
Resistor is connected, be sure that the average regeneration power (Pr) does not exceed the
External Regeneration Resistor’s regenerative energy absorption capacity (12 W).
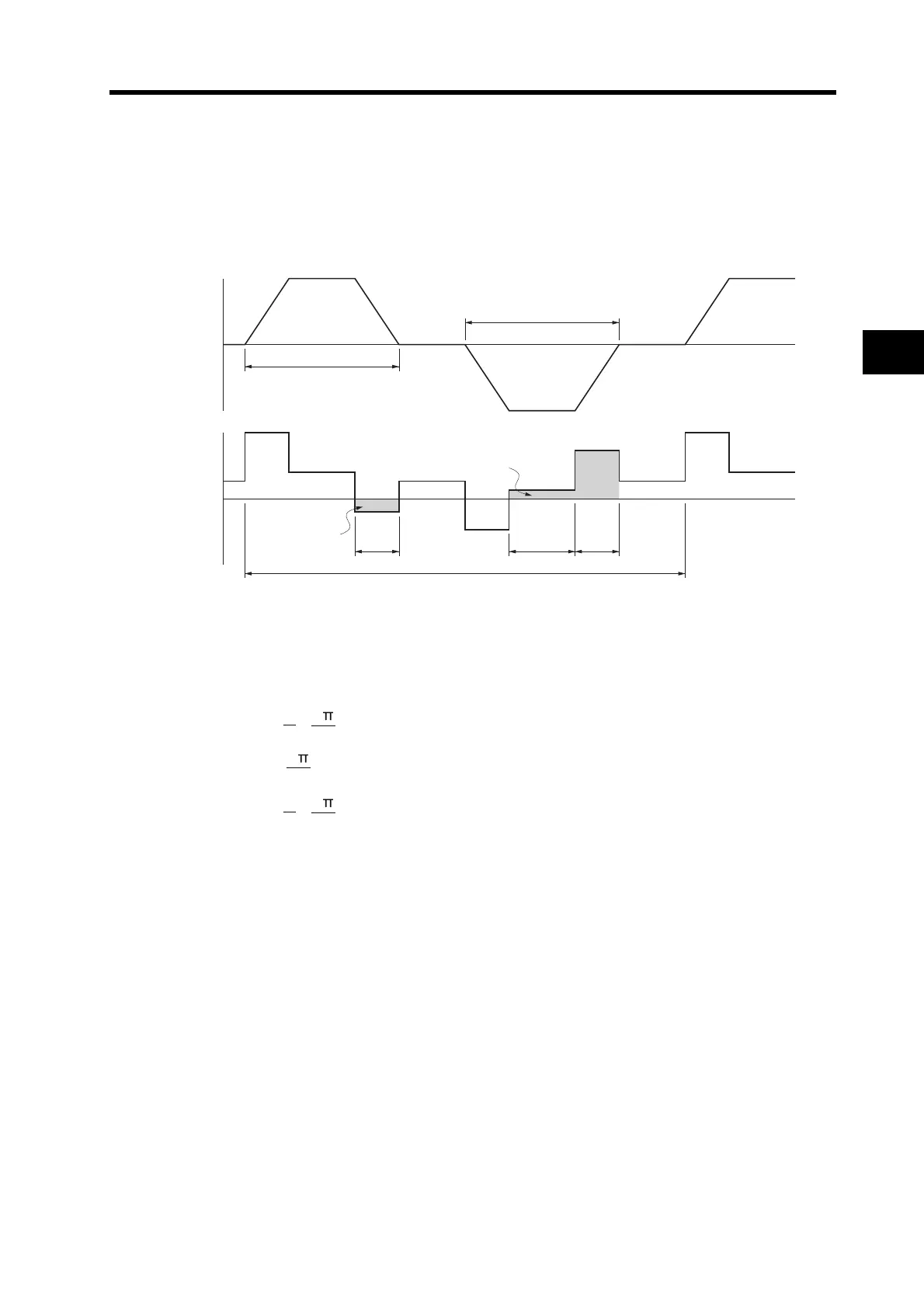
Vertical Axis
Note In the output torque graph, acceleration in the positive direction (rising) is shown as positive,
and acceleration in the negative direction (falling) is shown as negative.
The regenerative energy values in each region can be derived from the following equations.
Note Due to the loss of winding resistance and PWM, the actual regenerative energy will be
approximately 90% of the values derived from these equations.
The average regeneration power (Pr): Regeneration power produced in one cycle of operation
[W].
Since an internal capacitor absorbs regenerative energy, the value for E
g1
and (E
g2
+ E
g3
)(unit: J)
must be lower than the Servo Drive’s regenerative energy absorption capacity. (For details, refer
to Servo Drive Regenerative Energy Absorption Capacity.)
Servomotor
operation
Servomotor
output torque
+N
1
−N2
t1 t2 t3
T
E
g1
Eg3
Eg3
Rising
Falling
T
D2
TL2
TD1
Eg2
11
1
2
2
1
t
1TNE
D
g
=
60
****
[J] =0.0524 N1 TD1 t1 [J]
** *
22
3
2
2
1
t
3TNE
D
g
=
60
****
[J] =0.0524 N2 TD2 t3 [J]
** *
222
2
2
tTNE
L
g
=
60
***
[J] =0.105 N2 TD2 t3 [J]
** *
N1, N2: Rotation speed at beginning of deceleration [r/min]
T
D1, TD2: Deceleration torque [N·m]
T
L2: Torque when falling [N·m]
t
1, t3: Deceleration time [s]
t
2: Constant-velocity running time when falling [s]
2Eg1Eg
=
Pr ( + ) / T [W] T: Operation cycle [s]2Eg+
 Loading...
Loading...




