3-25
3-2 Servomotor Specifications
3
Specifications
Applicable Load Inertia
The drivable load inertia ratio (load inertia/rotor inertia) depends on the configuration and rigidity
of the machine being driven. Machines with high rigidity can be operated with a large load inertia.
Select the appropriate Servomotor and confirm the applicable load inertia.
Frequently operating a dynamic brake with a large load inertia may burn the dynamic brake
resistor. Do not turn ON/OFF the Servomotor frequently with the dynamic brake enabled.
Encoder Specifications
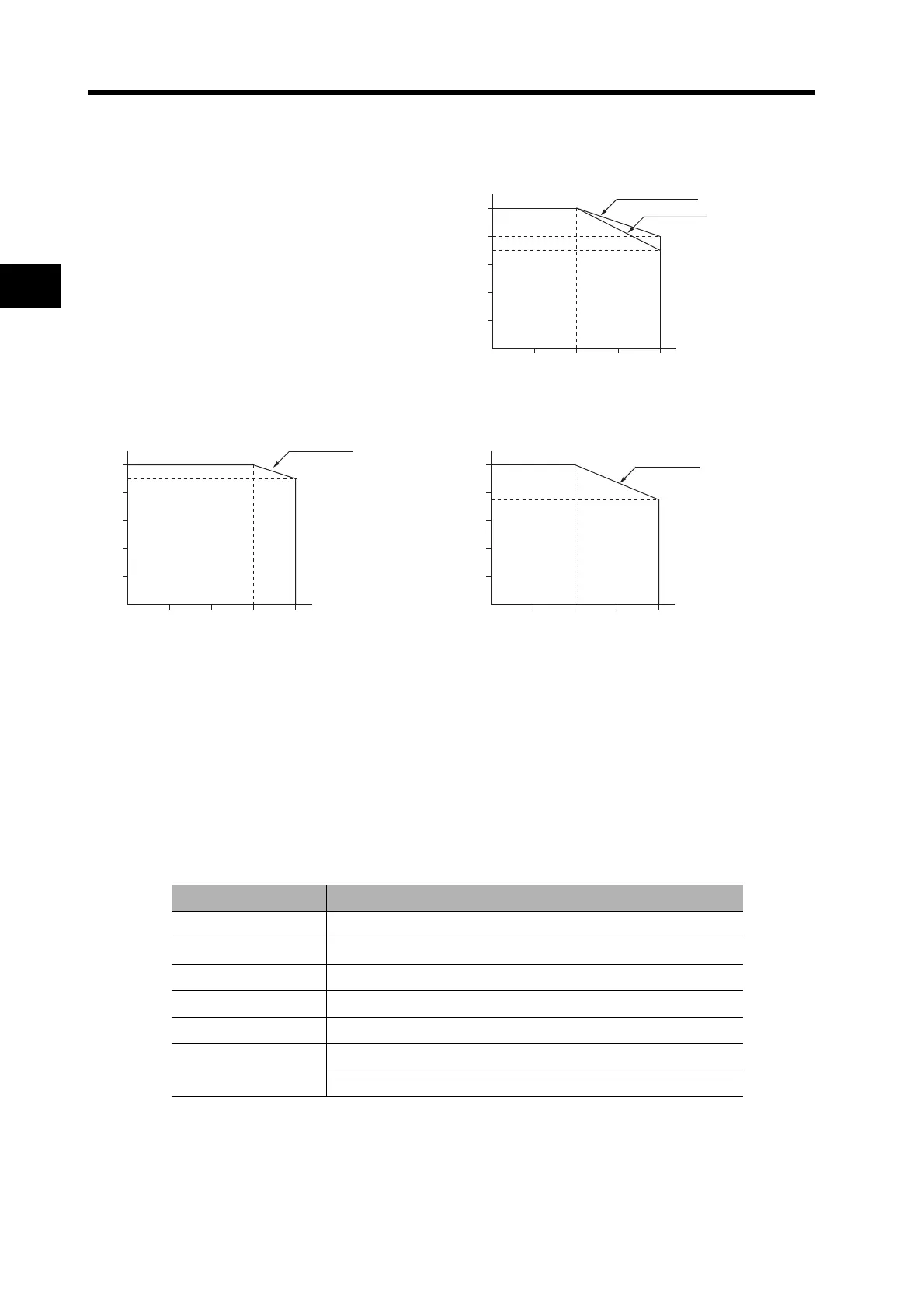
10 20 30 40
0
Ambient temperature
Rated Torque Ratio (%)
200 W (With Oil Seal)
20
40
60
80
100
80%
70%
With brake
Without brake
20
10 20 30 40
0
40
60
80
100
Rated Torque Ratio (%)
400 W (Without Oil Seal)
10 20 30 40
0
Ambient temperature
Rated Torque Ratio (%)
400 W (With Oil Seal)
Ambient temperature
20
40
60
80
100
With brake
90%
75%
With brake
Item Specifications
Encoder system Optical encoder (incremental encoder)
No. of output pulses Phases A and B: 2,500 pulses/rotation, Phase Z: 1 pulse/rotation
Power supply voltage 5 V ±5%
Power supply current 180 mA (max.)
Output signals +S, −S
Output interface
EIA-RS-485 compliance
Bidirectional serial communications data
 Loading...
Loading...




