Chapter 4
4-16
Operation
Pn110 Online autotuning
setting
0 Online autotun-
ing selection
0 Autotunes initial operations only
after power is turned ON.
0012 – – Yes
The
power
supply
does not
need to
be
restarted.
for
Pn110.2.
1 Always autotunes.
2 No autotuning
1 Not used. 1 –
2 Adhesive friction
compensation
selection
0 Friction compensation: OFF
1 Friction compensation: Rated
torque ratio small
2 Friction compensation: Rated
torque ratio large
3 Not used. 0 –
Pn200 Position control
setting 1
0 Command pulse
mode
0 Feed pulse forward and reverse
signal, positive logic
1011 – – Yes
1 Forward pulse and reverse
pulse, positive logic
290
° phase difference (phase
A/B) signal (
×1), positive logic
390
° phase difference (phase
A/B) signal (
×2), positive logic
490
° phase difference (phase
A/B) signal (
×4), positive logic
5 Feed pulses forward and
reverse signal, negative logic
6 Forward pulse and reverse
pulse, negative logic
790
° phase difference (phase
A/B) signal (
×1), negative logic
890
° phase difference (phase
A/B) signal (
×2), negative logic
990
° phase difference (phase
A/B) signal (
×4), negative logic
1 Deviation counter
reset
0 Signal high level
1 Rising edge (low to high)
2 Signal low level
3 Falling signal (high to low)
2 Deviation counter
reset for alarms
and when servo is
turned OFF
0 Deviation counter reset when
an alarm occurs and when Ser-
vomotor is OFF.
1 Deviation counter not reset
when an alarm occurs nor when
Servomotor is OFF.
2 Deviation counter reset only
when an alarm occurs.
3 Not used. 1 –
Pn202 Electronic gear
ratio G1 (numera-
tor)
The pulse rate for the command pulses and Servo Servomotor travel dis-
tance
0.01
≤ G1/G2 ≤ 100
4 – 1 to 65535 Yes
Pn203 Electronic gear
ratio G2 (denomi-
nator)
1 – 1 to 65535 Yes
Pn204 Position com-
mand filter time
constant 1 (pri-
mary filter)
Soft start setting for command pulses (Soft start characteristics are for
the primary filter.)
0
×0.01 ms 0 to 6400 –
Pn207 Position control
setting 2
0 Selects position
command filter.
0 Primary filter (Pn204) 0000 – – Yes
1 Linear acceleration and decel-
eration (Pn208)
1 to 3 Not used. 0 –
Pn208 Position com-
mand filter time
constant 2
(Linear accelera-
tion and deceler-
ation)
Soft start setting for command pulses (Soft start characteristics are for
the linear acceleration and deceleration.)
0
×0.01 ms 0 to 6400 Yes
Pn304 Jog speed Rotation speed during jog operation 500 r/min 0 to 10000 –
Pn401 Torque com-
mand filter time
constant
The constant when filtering the internal torque command 40
×0.01 ms 0 to 65535 –
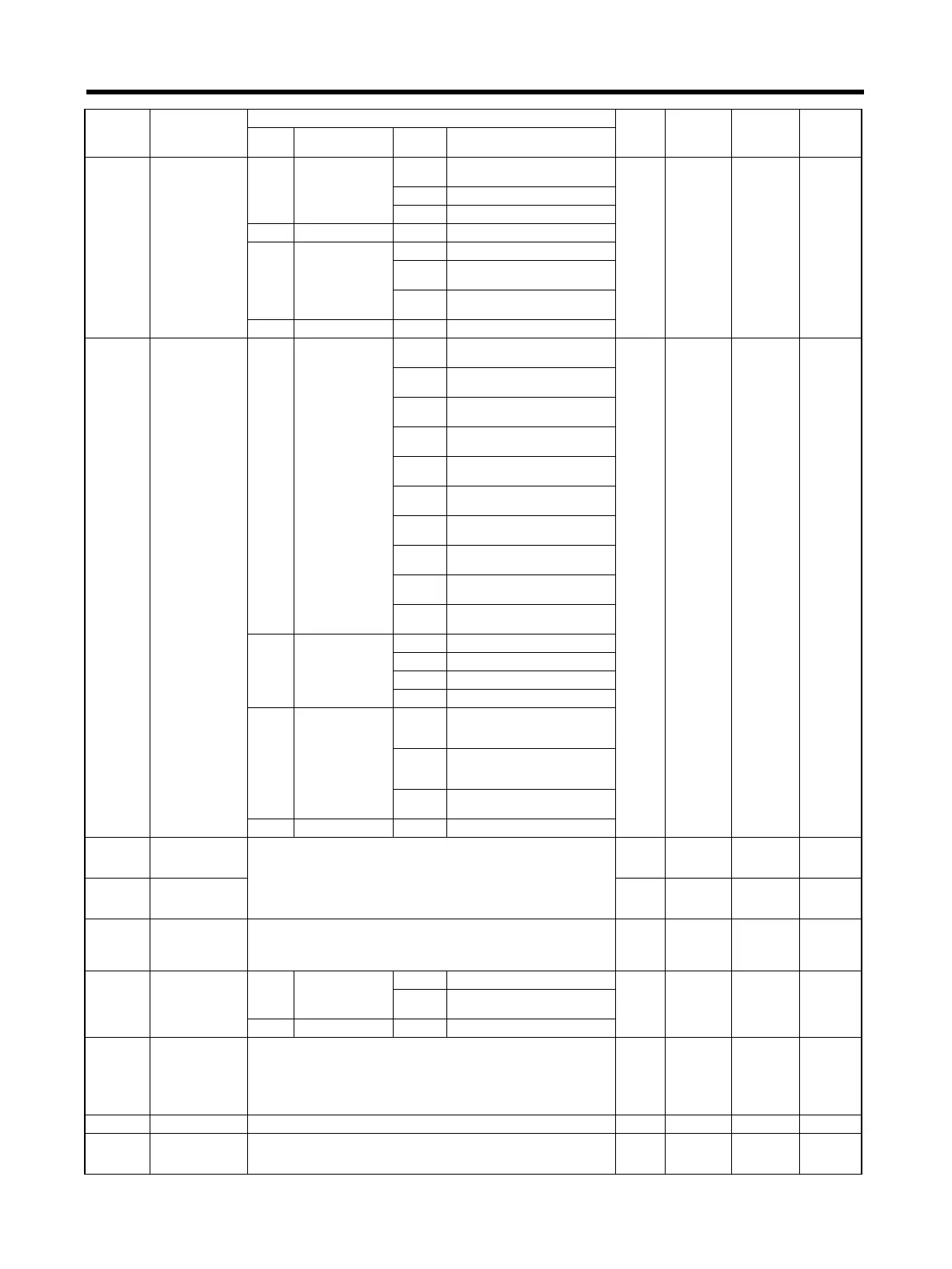
Parameter
No.
Parameter name Description for parameters set with 5 digits Default Unit Setting
range
Restart?
Digit
No.
Name Setting Description for parameters
with individually set digits
 Loading...
Loading...



