Chapter 4
4-31
Operation
4-7-5 Position Command Filter Function
■ Functions
• Perform soft start processing for the command pulses using the selected filter to gently accelerate
and decelerate.
• Select the filter characteristics using Pn207.0 (position command filter selection).
• When Pn204 (position command filter time constant 1) is selected, acceleration and deceleration
are performed using the primary filter (exponentiation function).
• When Pn208 (position command filter time constant 2) is selected, acceleration and deceleration
are linear.
• This function is effective in the following cases:
There is no acceleration/deceleration function in the command pulse (controller).
The command pulse frequency changes rapidly, causing the machinery to vibrate during acceler-
ation and deceleration.
The electronic gear setting is high (G1/G2
≥ 10).
■ Parameters Requiring Settings
Note If not using the position command filter function, set each to 0 (i.e., the default setting).
■ Operation
• The characteristics for each filter are shown below.
• Servomotor acceleration and deceleration are delayed further than the characteristics shown below
due to position loop gain delay.
Acceleration: 2/Kp (s); Deceleration: 3/Kp (s); Kp: Position loop gain (Pn102)
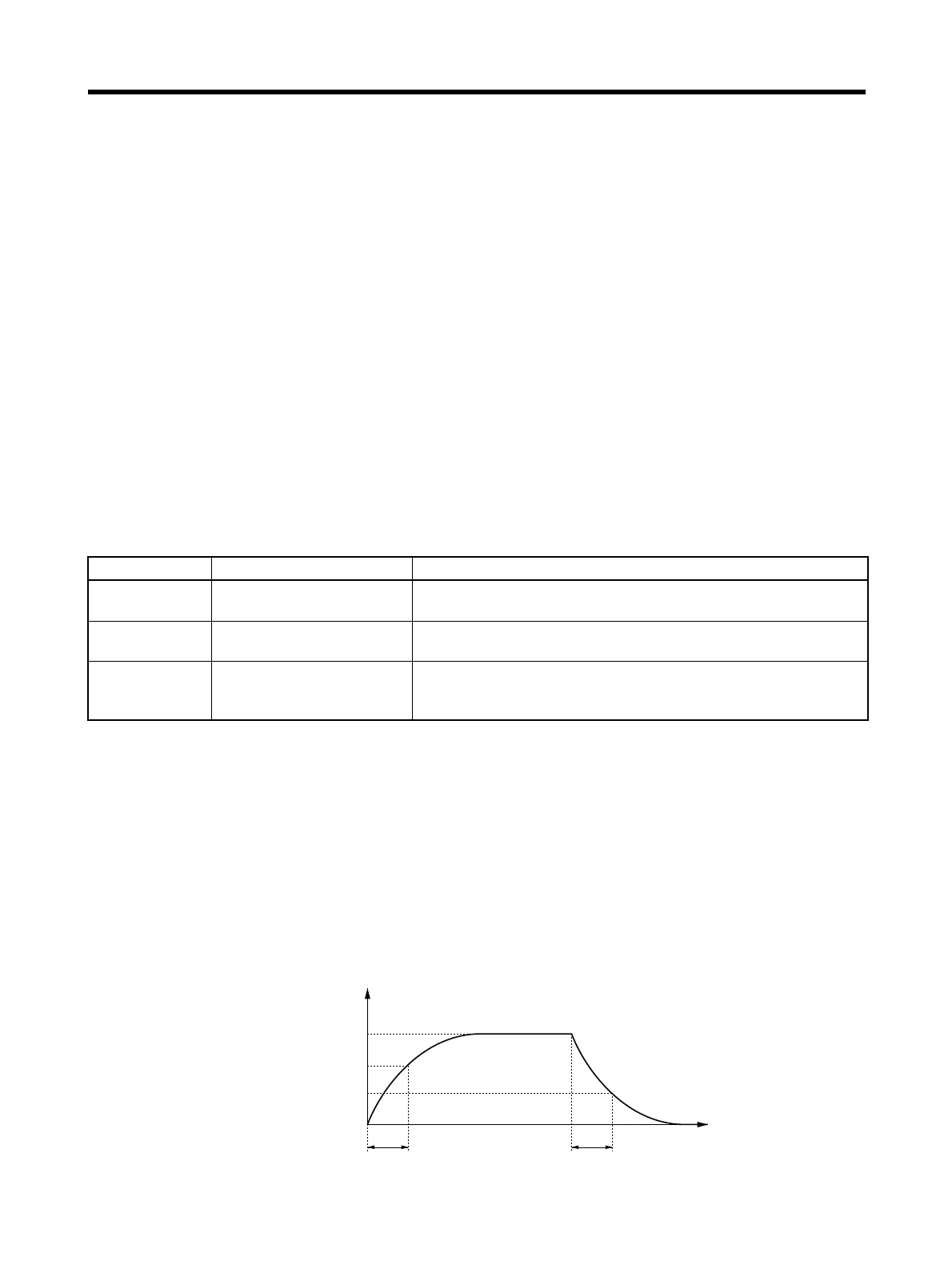
● Primary Filter
Parameter No. Parameter name Explanation
Pn207.0 Select position control filter Select either primary filter (setting: 0), or linear acceleration
and deceleration (setting: 1).
Pn204 Position control filter time
constant 1 (primary filter)
Enabled when Pn207.0 = 0. Be sure to set the primary filter
time constant (setting range = 0 to 6400 (
× 0.01 ms)).
Pn208 Position control filter time
constant 2 (linear acceler-
ation and deceleration)
Enabled when Pn207.0 = 1. Be sure to set the acceleration and
deceleration times (setting range = 0 to 6400 (
× 0.01 ms)).
Speed
Command pulse
input frequency
Input frequency x 0.63
Input frequency x 0.37
Time
Pn204 Pn204
 Loading...
Loading...



