Chapter 4
4-15
Operation
4-6 User Parameters
This section describes the Servo Driver internal user parameters. Even if operating
using the Servo Driver’s front panel switch settings, be sure to understand the kinds of
functions that are set with the parameters.
Note R7A-PR02A Parameter Unit is required to change user parameters. Refer to Operation Manual
(I534) for detailed operation procedures.
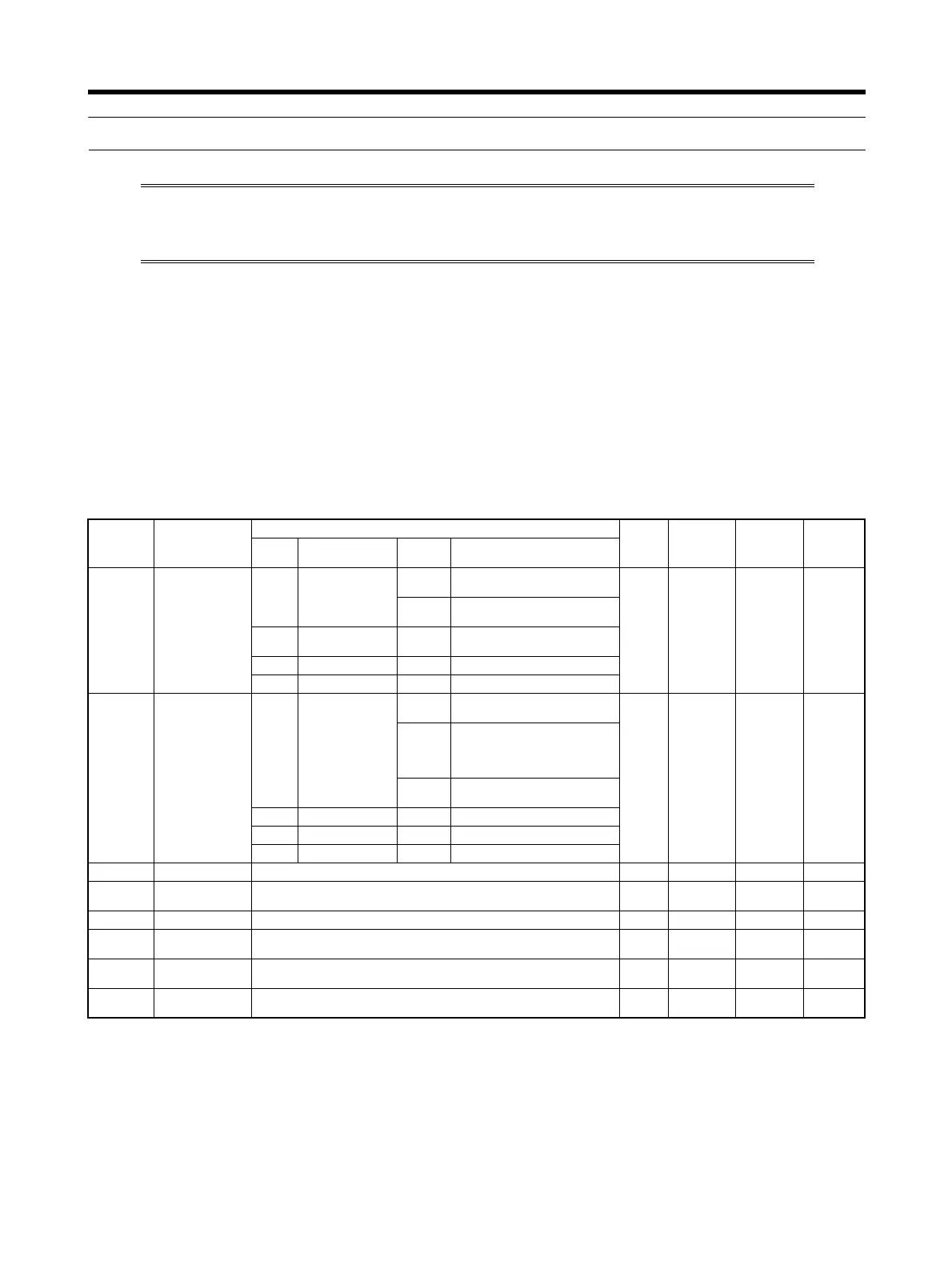
4-6-1 Parameter Tables
• The parameters for which each digit number must be set separately are given with the digit number
added to the parameter number. For example, Pn001.0 (i.e., digit 0 of parameter Pn001).
• The default setting for parameters set using 5 digits are given in the table without leading zeros
(e.g., if the default setting is 00080, 80 is given in the table).
Parameter
No.
Parameter name Description for parameters set with 5 digits Default Unit Setting
range
Restart?
Digit
No.
Name Setting Description for parameters
with individually set digits
Pn000 Basic switches 1 0 Reverse rotation
mode
0 CCW direction is taken for posi-
tive command.
0010 – – Yes
1 CW direction is taken for posi-
tive command.
1 Control mode
selection
1 Position control by pulse train
command
2 Not used. 0 –
3 Not used. 0 –
Pn001 Basic switches 2 0 Stop selection if
an alarm occurs
when servo is
OFF
0 Servomotor stopped by
dynamic brake.
1002 – – Yes
1 Servomotor stopped by
dynamic brake.
Dynamic brake released after
Servomotor stops.
2 Servomotor stopped with free
run.
1 Not used. 0 –
2 Not used. 0 –
3 Not used. 1 –
Pn100 Speed loop gain Speed loop response adjustment 80 Hz 1 to 2000 –
Pn101 Speed loop inte-
gral time constant
Speed loop integral time constant 2000
×0.01 ms 15 to 51200 –
Pn102 Position loop gain Adjusts position loop responsiveness. 40 1/s 1 to 2000 –
Pn103 Inertia ratio The ratio between the machine system inertia and the Servomotor rotor
inertia
300 % 0 to 10000 –
Pn109 Feed-forward
amount
Position control feed-forward compensation 0 % 0 to 100 –
Pn10A Feed-forward
command filter
The position control feed-forward command filter 0
×0.01 ms 0 to 6400 –
 Loading...
Loading...



