INTERFACE MANUAL
9. Connecting High-Speed Input Signal Cable (Option)
The X8HL printed board is available as the optional module which is exclusively
used for the TS2000/TS2100 robot controller.
This X8HL printed board is provided with eight (8) high-speed inputs. Though a
filter of 0.22 ms (calculated value) is normally provided for the inputs, only a filter of
2.2 µs (calculated value) is provided for the high-speed inputs. To prevent
mis-operation, input a signal without chattering and less noise.
For the input specifications, a bidirectional photocoupler is used in the input circuit,
and it is possible to change over the source type or sink type by the selection of
COM.
To connect the high-speed input signal cable, use the connector [XM2D–1501
(socket type connector), XM2S–1511 (connector cover)] attached to the X8HL
printed board.
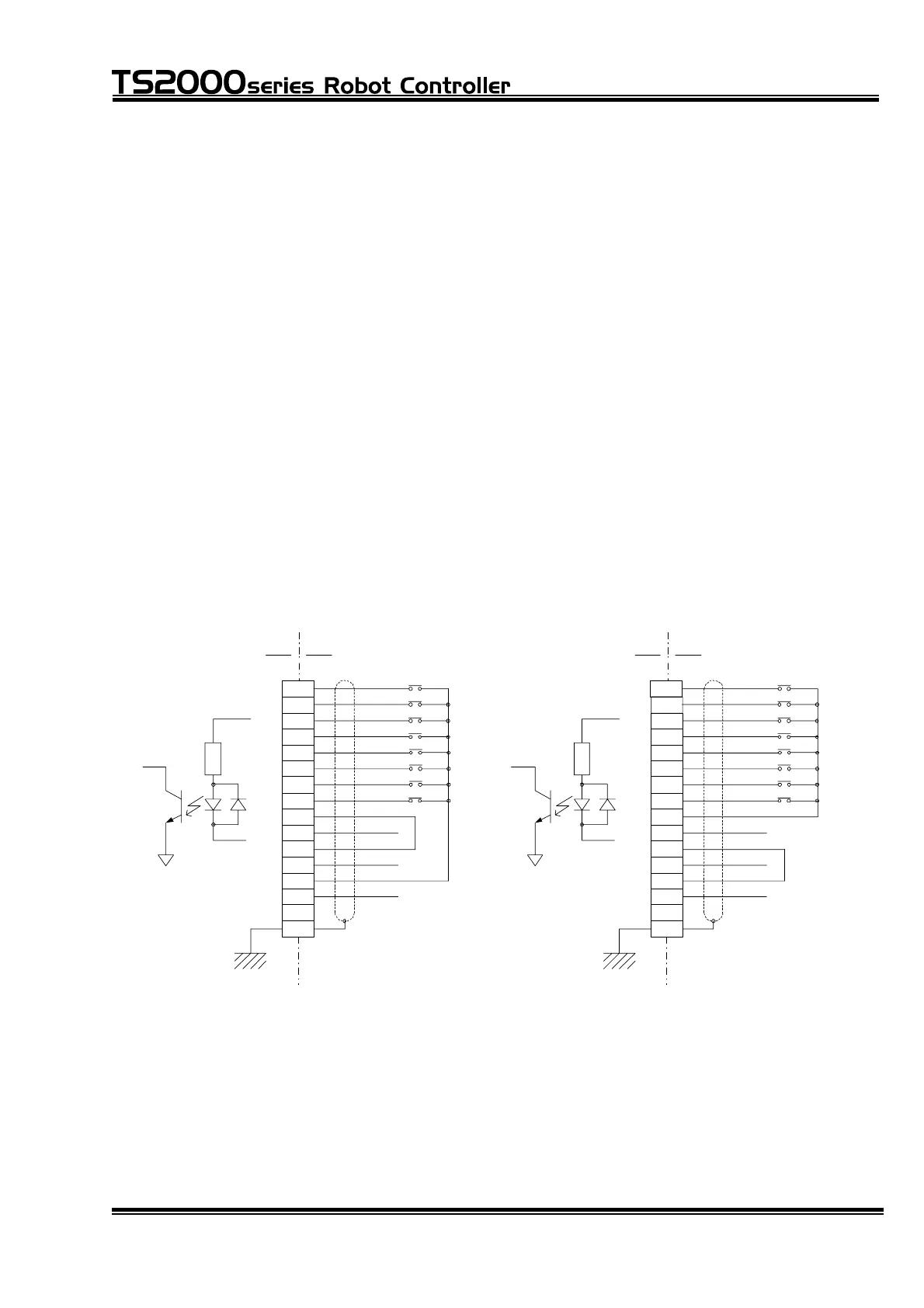
Source type ("+" common) Sink type ("–" common)
9
2
10
3
11
4
12
5
13
6
14
7
15
8
Case
User side
DI_49
XM2D-1501 (cable connector)
XM2S-1511 (connector cover)
TS2000/TS2100
robot controller
(X8HL printed board)
FG
CN15
COM
P24V
COM
1
P24G
P24V
COM
9
2
10
3
11
4
12
5
13
6
14
7
15
8
Case
User side
XM2D-1501 (cable connector)
XM2S-1511 (connector cover)
TS2000/TS2100
robot controller
(X8HL printed board)
FG
CN15
COM
P24V
COM
1
P24V
COM
P24G
P24G
P24G
Source type
("+ " common)
Sink type
("-" common)
DI_50
DI_51
DI_52
DI_53
DI_54
DI_55
DI_56
(49)
(50)
(51)
(52)
(53)
(54)
(55)
(56)
DI_49
DI_50
DI_51
DI_52
DI_53
DI_54
DI_55
DI_56
(49)
(50)
(51)
(52)
(53)
(54)
(55)
(56)
( ): Signal name of DIN command ( ): Signal name of DIN command
Fig. 9.1 Connection of high-speed input signal cable
The specifications of the high-speed input signal are the same as in the
TR48DIOCN/TR48DIOC modules. For details, see Para. 8.1.1.
When this input signal is used as the conveyor synchronous start trigger input
function, it cannot serve as the high-speed input function.
STE 71367
– 106 –

 Loading...
Loading...





