Gravity Alpha
The Gravity Alpha is a positive rotation direction around the x-axis in the base
coordinate system. The value is set in radians.
Note
The system parameter Gravity Alpha is not supported for all robot types. It is not
supported for IRB 140, IRB 1410, IRB 1600ID, IRB 2400, IRB 4400, IRB 6400R,
IRB 6400 (except for IRB 6400 200/2.5 and IRB 6400 200/2.8), IRB 6600, IRB
6650, IRB 6650S and IRB 7600 (except for IRB 7600 325/3.1).
If the robot does not support Gravity Alpha, then use Gravity Beta along with the
recalibration of axis 1 to define the rotation of the robot around the x-axis.
Note
The parameter is supported for all robots on track when the system parameter
7 axes high performance motion is set, see Technical reference manual - System
parameters.
Gamma Rotation
Gamma Rotation defines the orientation of the robot foot on the travel carriage
(track motion).
Mounting angles and values
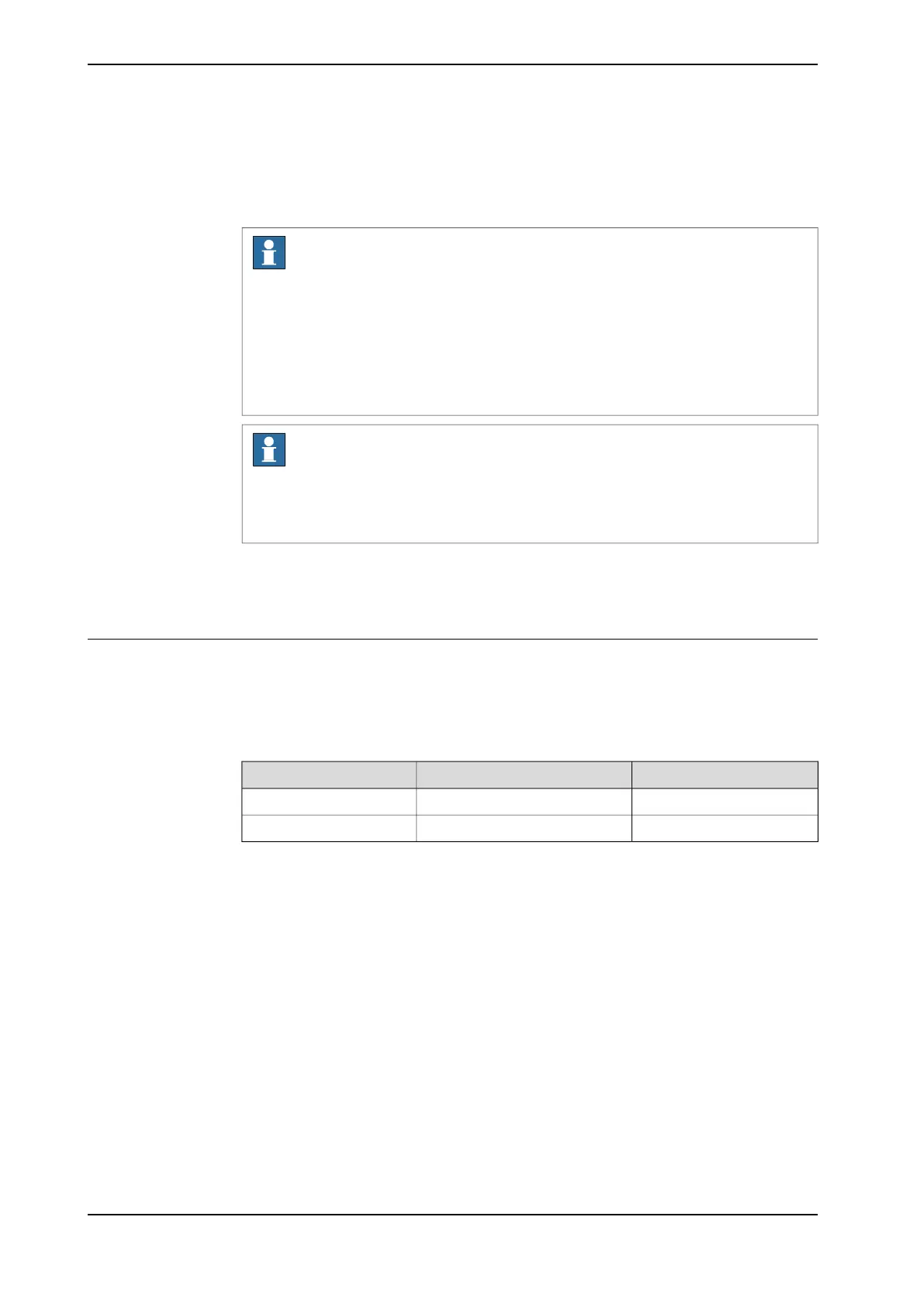
The parameter Gravity Beta (or Gravity Alpha) specifies the mounting angle of the
robot in radians. It is calculated in the following way.
Gravity Beta = A° x 3.141593/180 = B radians, where A is the mounting
angle in degrees and B is the mounting angle in radians.
Gravity BetaMounting angle (A°)Example of position
0.000000 (Default)0°Floor mounted
3.141593180°Suspended mounting
Continues on next page
68 Product manual - IRB 2400
3HAC022031-001 Revision: P
© Copyright 2004-2018 ABB. All rights reserved.
2 Installation and commissioning
2.3.7 Setting the system parameters for a suspended or tilted robot
Continued

 Loading...
Loading...








