
 Loading...
Loading...Do you have a question about the ABB IRB 6660 - 130/3.1 and is the answer not in the manual?
| Model | IRB 6660 - 130/3.1 |
|---|---|
| Category | Industrial Robot |
| Manufacturer | ABB |
| Payload | 130 kg |
| Reach | 3.1 m |
| Degrees of Freedom | 6 |
| Number of axes | 6 |
| Mounting | Floor |
| Protection Class | IP 67 |
| Repeatability | ±0.05 mm |
| Robot Control | IRC5 |
| Type | Articulated |
| Protection | Dust and water-resistant |
Covers essential safety principles and general precautions for robot operation.
Details critical safety procedures and actions to be taken in specific situations.
Identifies potential hazards during installation, service, and operation of the robot.
Specifies maintenance intervals, activities, and expected component lifetimes.
Details procedures for inspecting various robot components, including oil levels and mechanical parts.
Provides instructions for replacing or changing parts and fluids, such as gearbox oil.
Details procedures for replacing major robot assemblies like cable harnesses and arm systems.
Focuses on repair procedures for specific robot arm components like turning disks and parallel rods.
Details the replacement process for robot motors on various axes.
Provides instructions for replacing gearboxes on different robot axes.
Lists situations requiring robot system calibration, such as resolver value changes.
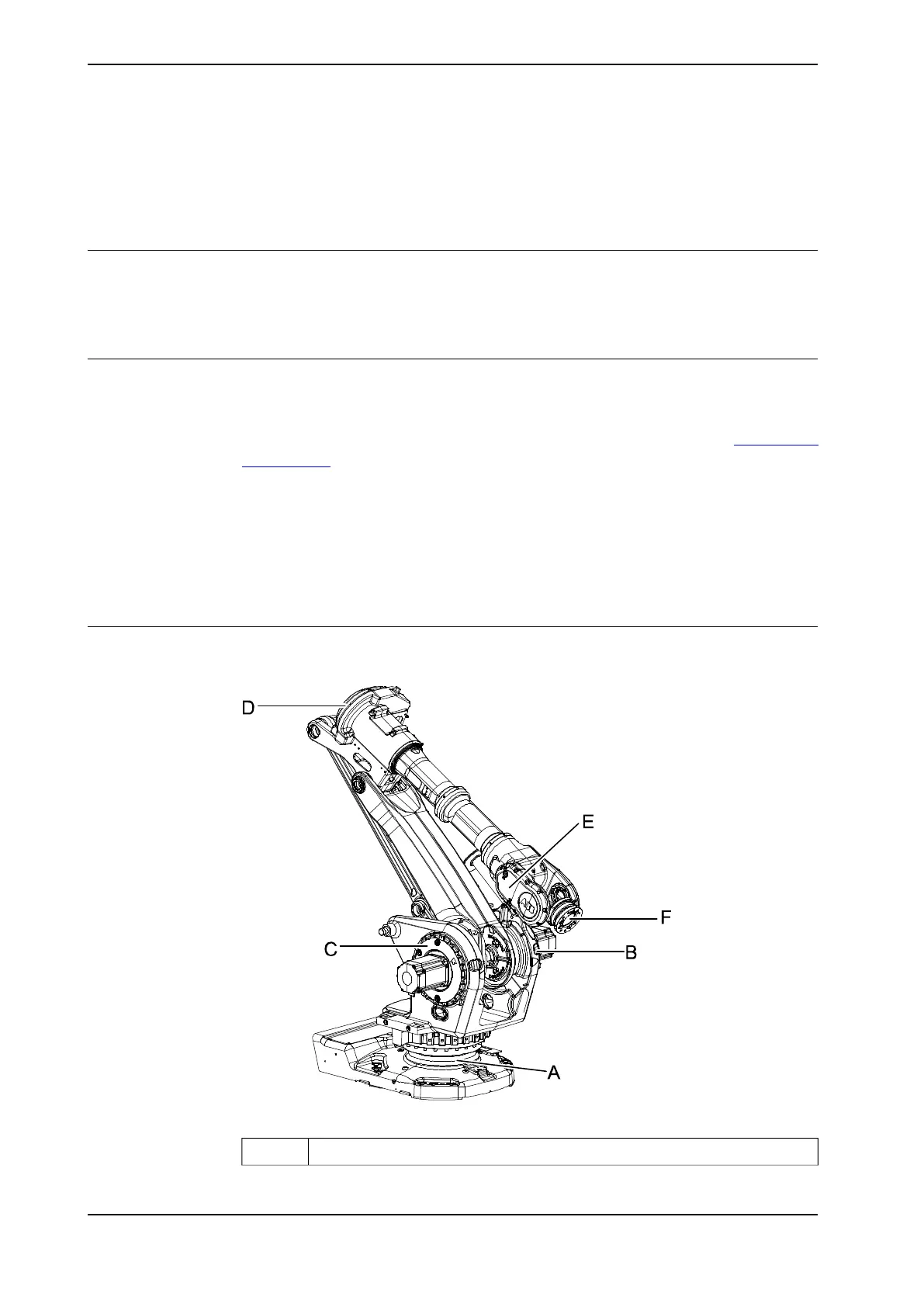
Shows the location of synchronization marks and defines axis movement directions for calibration.
Details the procedure for updating robot axis revolution counters using the FlexPendant.
Describes the Axis Calibration procedure, including tool usage and safety precautions.
Explains how to check the robot's synchronization position using MoveAbsJ or jogging.







