4.3.5 Replacement of complete arm system
Location of arm system
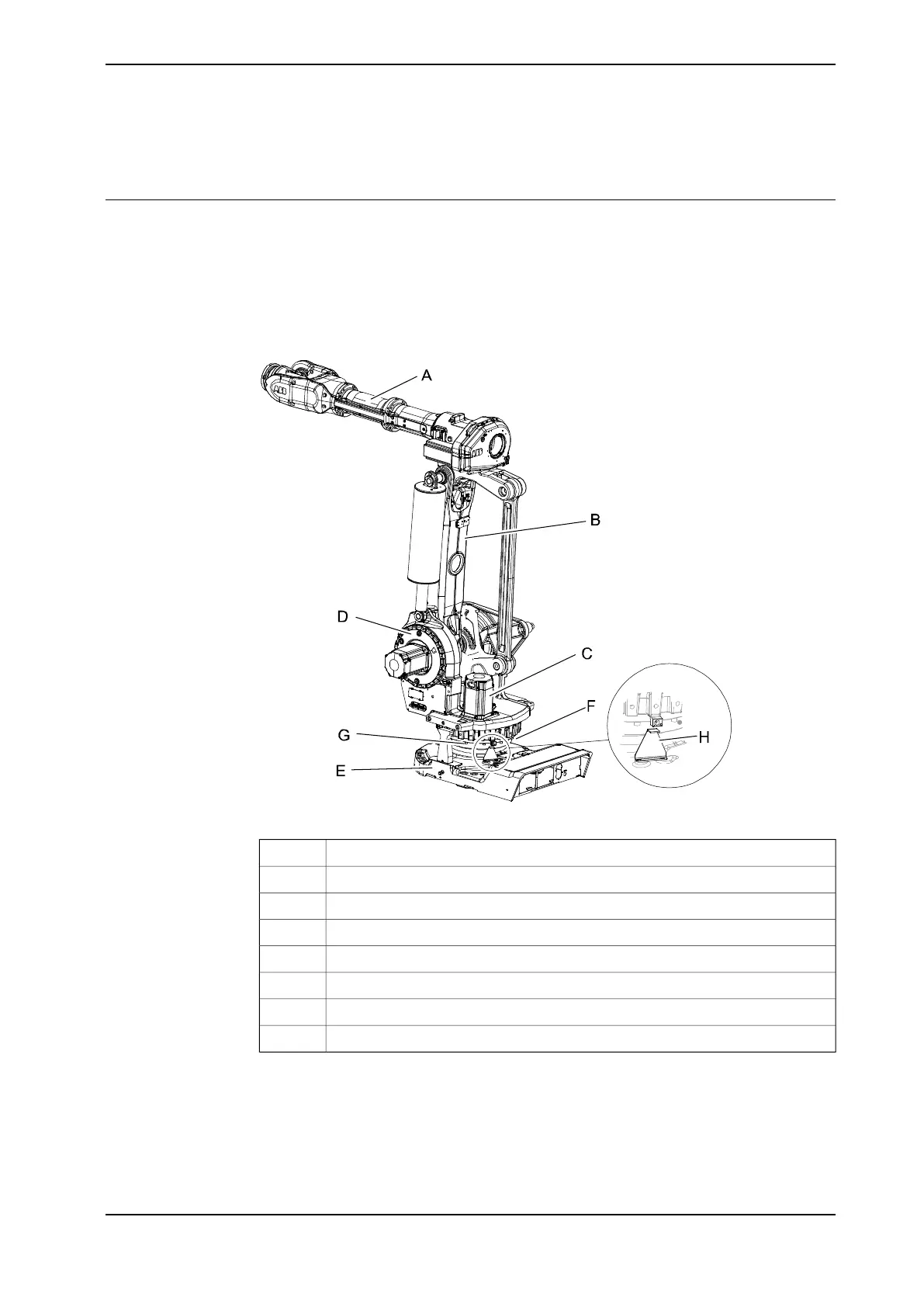
The complete arm system is defined as the complete robot except for the base
and axis-1 gearbox. This is shown in the figure below.
A more detailed view of the component and its position may be found in Spare part
lists on page 387.
IRB 6660 - 100/3.3, IRB 6660 - 130/3.1
xx0700000073
Upper armA
Lower armB
Motor, axis 1C
FrameD
BaseE
Gearbox, axis 1F
Attachment screws base M12x70, quality 12.9 Gleitmo (24 pcs)G
Calibration plate axis 1H
Continues on next page
Product manual - IRB 6660 207
3HAC028197-001 Revision: S
© Copyright 2007-2018 ABB. All rights reserved.
4 Repair
4.3.5 Replacement of complete arm system