4 Repair
4.3.1. Replacement of cable harness, axes 1-4
2513HAC022033-001 Revision: K
© Copyright 2004-2011 ABB. All rights reserved.
4.3 Complete robot
4.3.1. Replacement of cable harness, axes 1-4
Location of cable harness
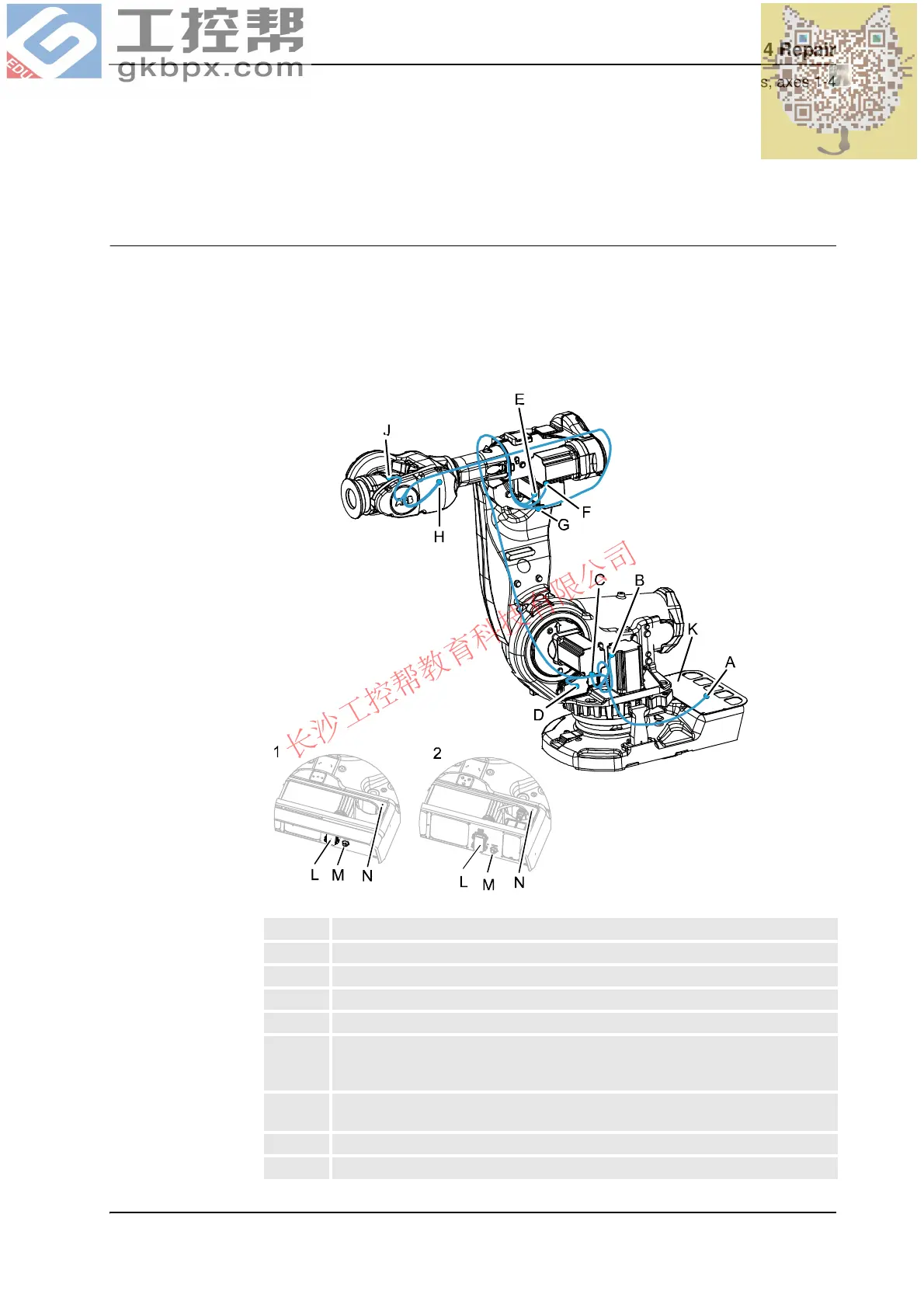
The cable harness for axes 1-4 is run throughout the base, frame and lower arm as shown in
the figure below.
The brake release unit can be located at two alternative places, either at the rear of the base
or at the side of the frame. Depending on the location, the two types of harnesses are
distinguished some from each other! Any differences are pointed out in the procedures!
xx0100000140
1 Alternative with brake release at frame
2 Alternative with brake release at base
A Connector at robot base, R1.MP and R1.SMB
B Connectors at motor 1; R2.FB1 and R2.MP1
C Connectors at motor 2; R2.FB2 and R2.MP2
D Connectors at serial measurement board; R1.SMB1-3, R1.SMB4-6, R1.SMB1.7,
R2.FB7 and R2.SMB. Battery connector X3 R1.G and R2.G. If brake release
located at the frame: also connectors X8, X9 and X10!
E Connectors at motor 3; R2.FB3 and R2.MP3 and for signal lamp R2.H1 and
R2.H2
F Connectors at motor 4; R2.FB4 and R2.MP4
G Connectors at cable harness separation; R2.M5/6
Continues on next page
 Loading...
Loading...










