4 Repair
4.3.3. Replacement of complete arm system
3HAC022033-001 Revision: K264
© Copyright 2004-2011 ABB. All rights reserved.
Required equipment
Removal, complete arm system
The procedure below details how to lift and remove the complete arm system.
Equipment, etc. Art. no. Note
Lifting device, robot 3HAC15607-1 Instruction 3HAC15971-2 enclosed!
Guide pins, M12 x 130 - Used to guide the complete arm
system when refitting.
Standard toolkit - Content is defined in section
Standard toolkit on page 427.
Other tools and procedures
may be required. See
references to these procedures
in the step-by-step instructions
below.
These procedures include
references to the tools required.
Action Note
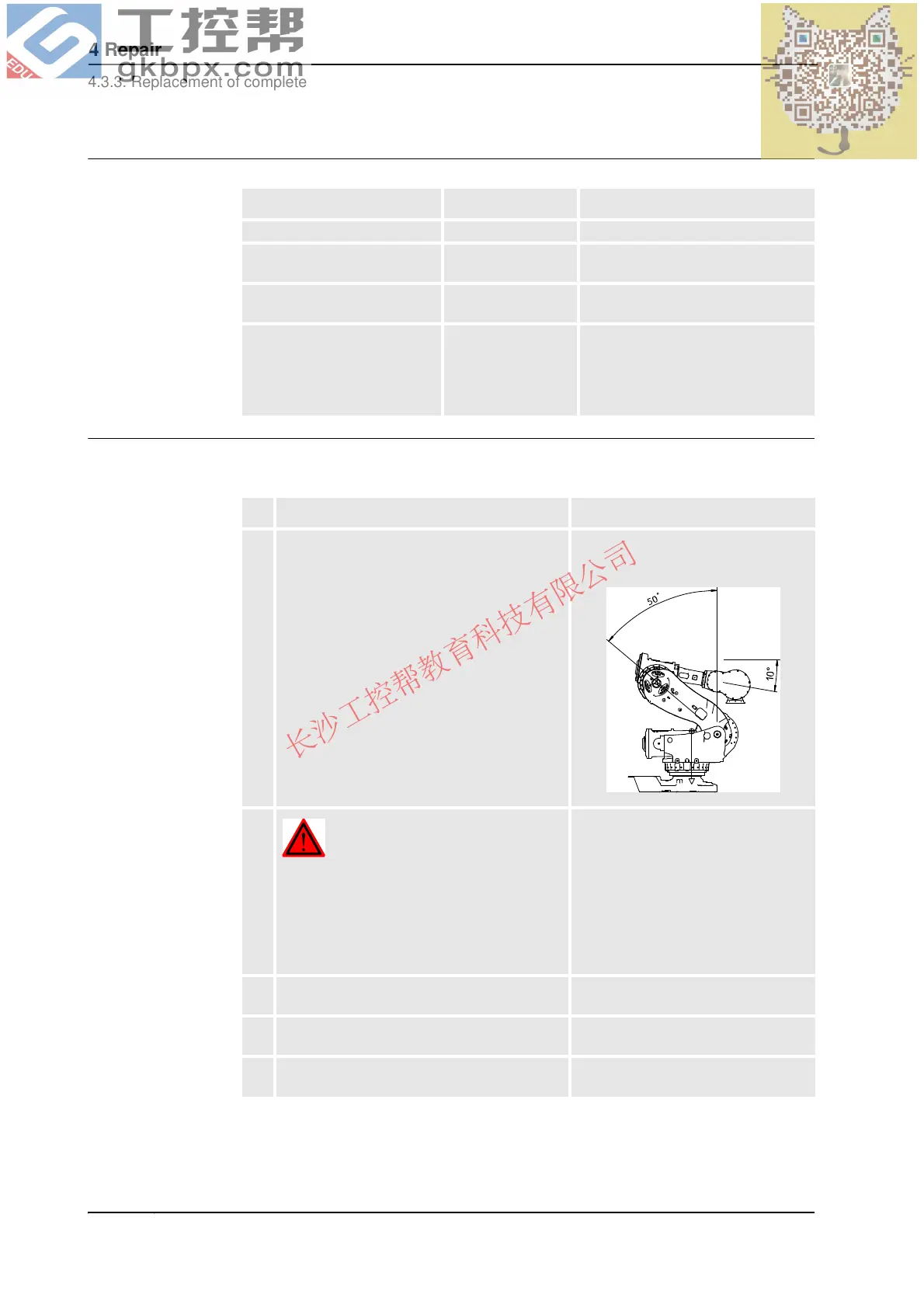
1. Position the robot in its most stable position, as
shown in the figure to the right.
If the brakes need to be released, see
section Manually releasing the brakes
on page 83.
xx0100000103
2.
DANGER!
Turn off all electric power, hydraulic and
pneumatic pressure supplies to the robot!
Turn off all electric power and hydraulic but not
the air pressure to the gearboxes, motors and
SMB.
3. Drain the oil from the gearbox, axis 1. Detailed in section Oil change,
gearbox axis 1 on page 199.
4. Remove the motor, axis 1. Detailed in section Removal, motor
axis 1 on page 328.
5. Run the overhead crane to a position above
the robot.
Continued
Continues on next page
 Loading...
Loading...










