Commissioning
Step-by-Step
• Add the terminal to the configuration as described in the chapter TwinCAT configuration settings [}52]
- manual or - Online scan [}58].
• Link the terminal with the NC as described in the chapter Integration in the NC configuration [}85].
• Import the motor XML file into the Startup directory as described in the chapter Settings in the CoE
[}93].
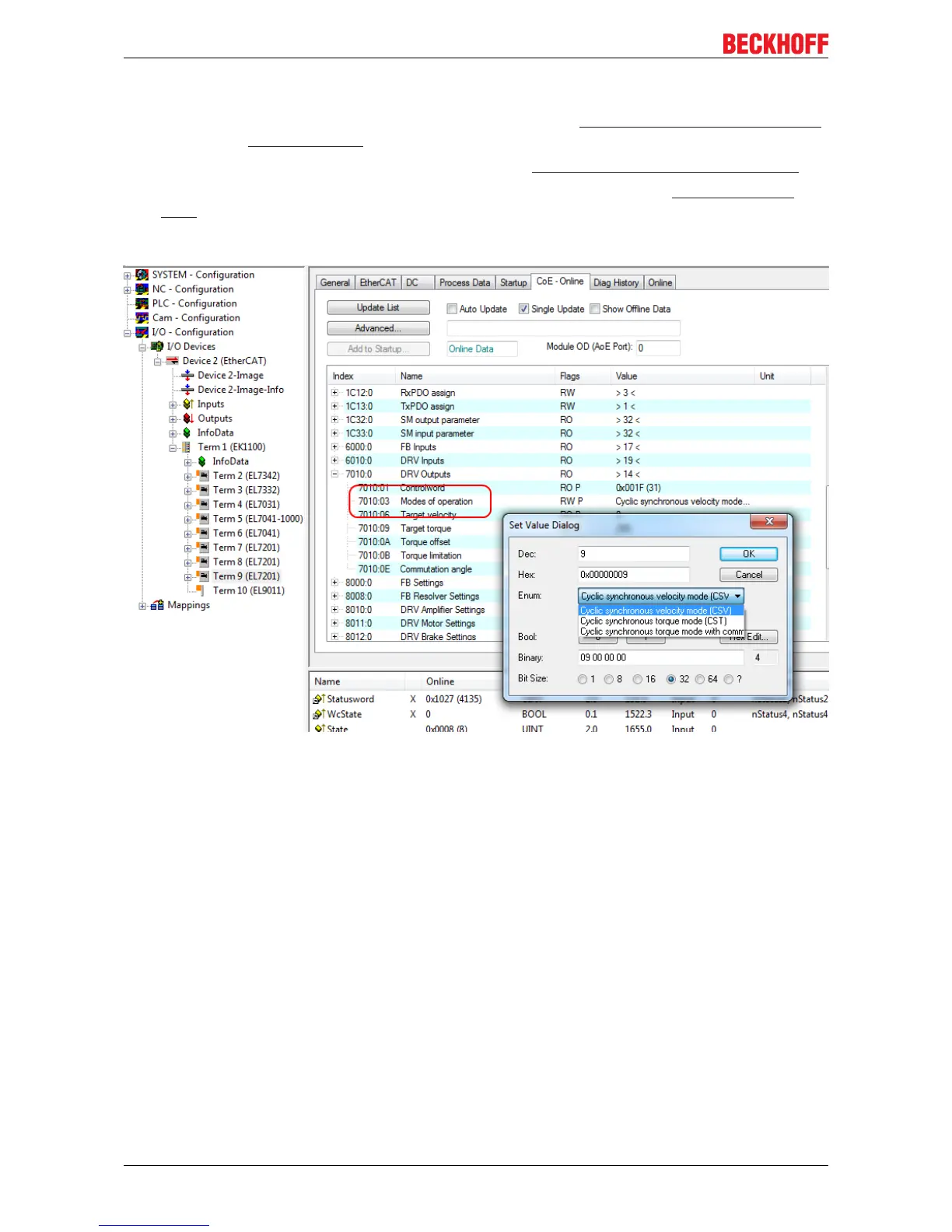
• Set the mode of operation in the CoE directory to Cyclic synchronous velocity mode (CSV), Fig.
Selection of the mode of operation.
Fig.150: Selection of the mode of operation
• Under Predefined PDO assignment, also select Cyclic synchronous velocity mode (CSV), Fig.
Selecting a predefined PDO assignment.
EL72x1-0010122 Version: 2.0

 Loading...
Loading...
