1-1-4.Response Frame Structure and Communication Error (Ver6)
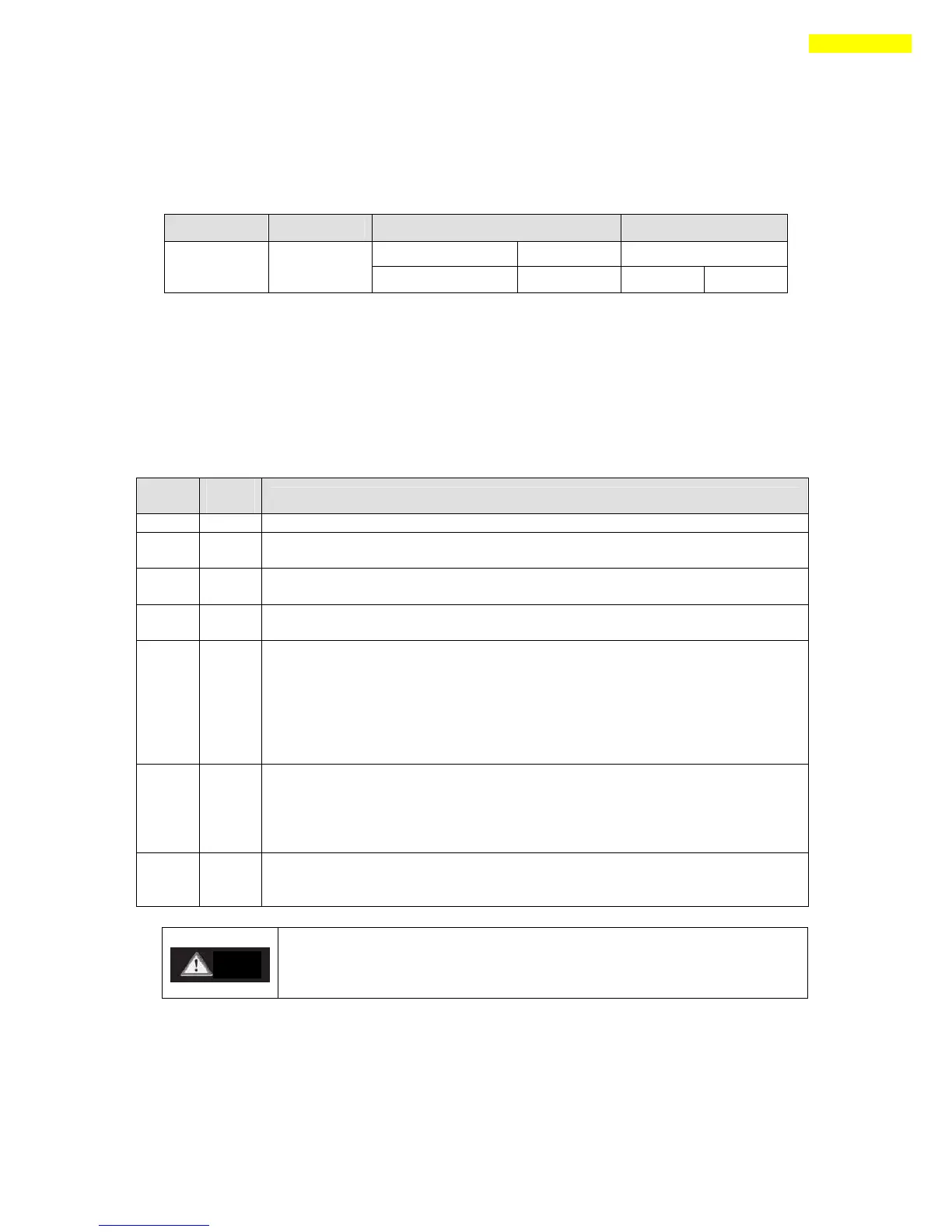
When any command is sent, the basic structure of Frame at the response side is identical.
However, there is a difference in case of
Frame Data,
which ‘communication sta tus’ is added
as shown below.
① Slave ID: Same to sending Frame.
(When this is not same to sending data, need to recognize as the error status.)
② Frame type: Same to sending Frame.
(When this is not same to sending data, need to recognize as the error status.)
③ Data: When simple executive instructi ons are sent, this data cannot be read. However, in case
of response, 1 byte is included to the display of communication status (error / normal status).
The code by bytes means the ‘Communication status’ as follows.
Frame Type Error :
Responded Frame type cannot be recognized.
Data error, ROM data read/write error :
Responded data value is aside from the given range.
Received Frame Error :
Frame data received is out of this specification.
Running Command Failure :
The user has tried to execute new running commands in wrong condition as
follows.
1) currently motor is running
2) currently motor is stopping
3) Servo is OFF status
4) try to Z-pulse Origin without external encoder
RESET Failure :
The user has tried to execute new running commands in wrong condition as
follows.
1) STEP is ON status
2) Already reset status by external input signal
CRC Error :
When received frame data is error by external noise, sending s ide of DLL
Library is automatically trying to send 1 more time of communication signal.
1) If ‘Header’ and ‘Slave ID’ values in the sending Frame are abnormal,
there is no response from the drive.
2) If the communication status is displayed to ‘130’, the size of response
data is ‘0’ byte.