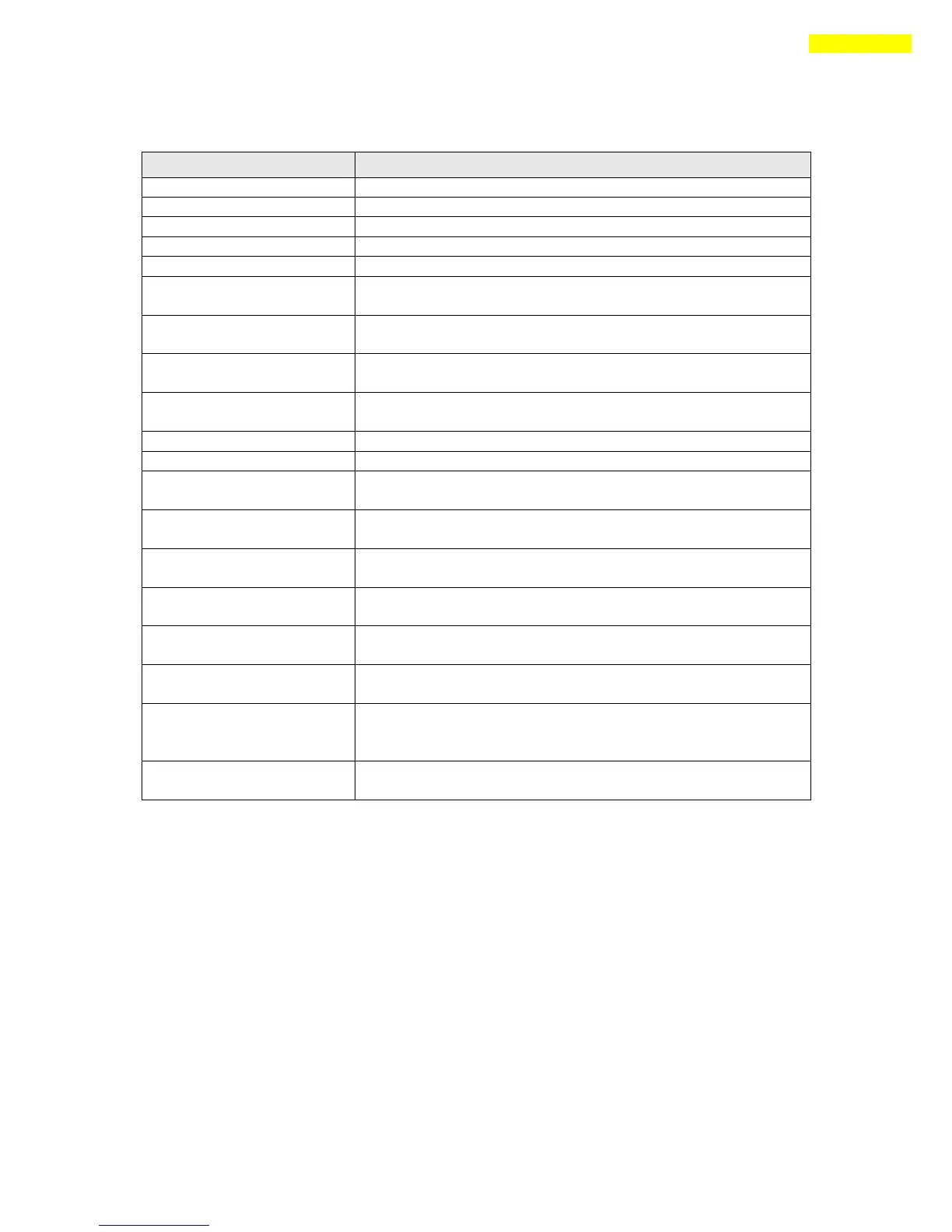
2- 9. Running Control Function
Stop the motor in running with deceleration.
Stop the motor in running immediately without deceleration.
Start operation to return origin.
The motor moves as much as the given absolute position value.
The motor moves as much as the given incremental position value.
The motor moves up to the position that the limit sensor is
detected.
The motor moves to the given velocity and direction :
This function is available to Jog motion.
Changed the target absolute position value [pulse] of the motor
in running.
Changed the target incremental position value [pulse] of the
motor in running.
Changed the running velocity value [pps] of the motor in running.
Stop all motors connected in same port with deceleration.
Stop all motors connected in same port immediately without
deceleration.
FAS_AllMoveOriginSingleAxis
Start operation to return all motors in same port to origin
position.
FAS_AllMoveSingleAxisAbsPos
All motors that connected in same port moves as much as the given
absolute position value.
FAS_AllMoveSingleAxisIncPos
All motors that connected in same port moves as much as the given
incremental position value.
FAS_MoveSingleAxisAbsPosEx
The motor moves as much as the given absolute position value
with custom accel/decel time value .
FAS_MoveSingleAxisIncPosEx
The motor moves as much as the given incremental position value
with custom accel/decel time value .
The motor moves to the given velocity and direction:
This function is available to J og motion with custom
accel/decel time value.
The motor starts pause in ru ning or the motor starts again
In pause status.