To change the absolute position value set while the motor moves to the absolute position
int FAS_PositionAbsOverride(
BYTE nPortNo,
BYTE iSlaveNo,
long lOverridePos
);
nPortNo
Port number of relevant drive.
iSlaveNo
Slave number of relevant drive.
lOverridePos
Absolute coordinate position value to be changed
FMM_OK : Command has been successfully performed.
FMM_NOT_OPEN : The drive has not been connected yet .
FMM_INVALID_PORT_NUM : There is no nPort in the connected ports .
FMM_INVALID_SLAVE_NUM : There is no drive of iSlaveNo in the relevant port .
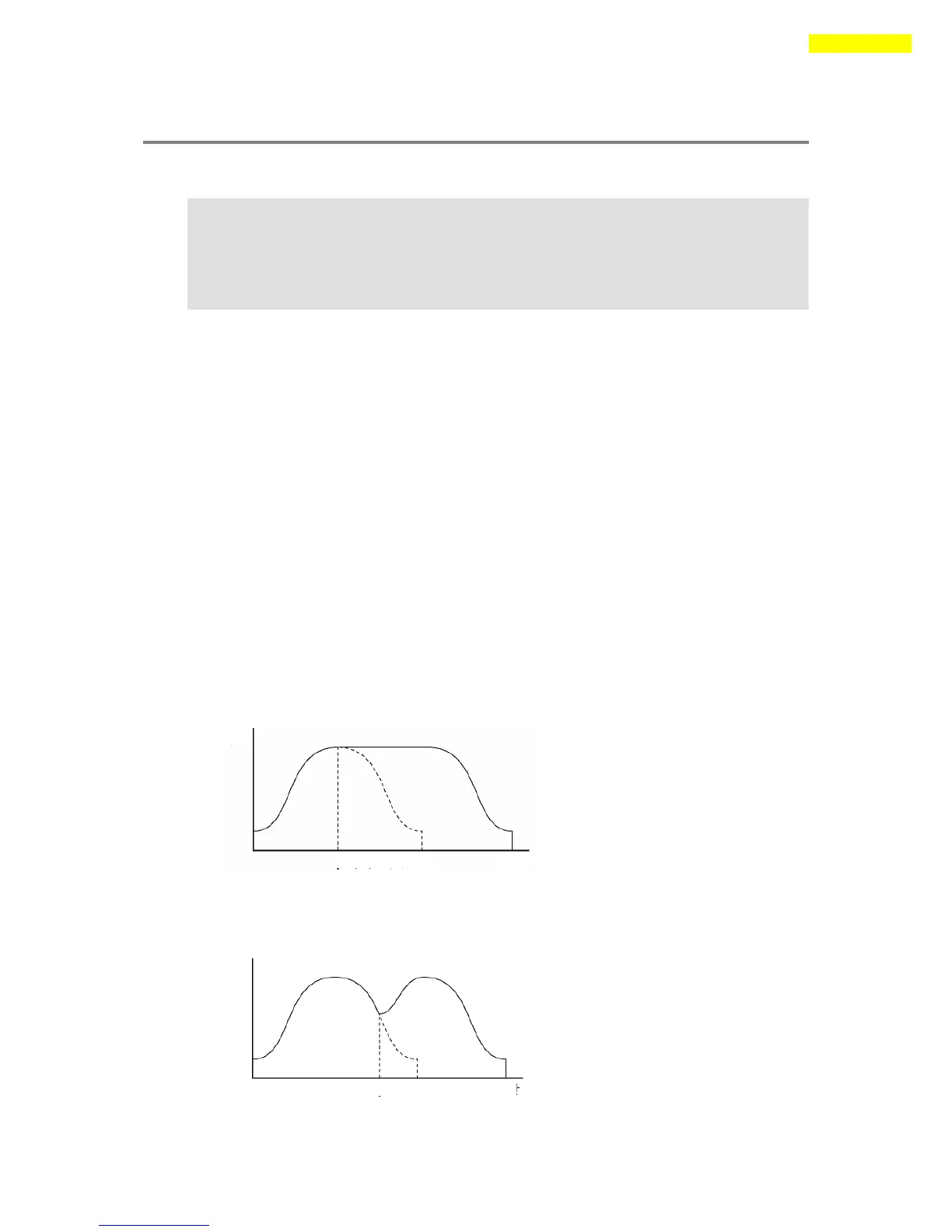
1) If the target position is set to the farther coordinate than the original target
position while the motor moves under acceleration or constant velocity , the motor
moves to the velocity pattern until then and stop s at the target position.
2) If the target position is changed while the motor is decelerated, it is again
accelerated up to the constant velocity and then stops at the target position.