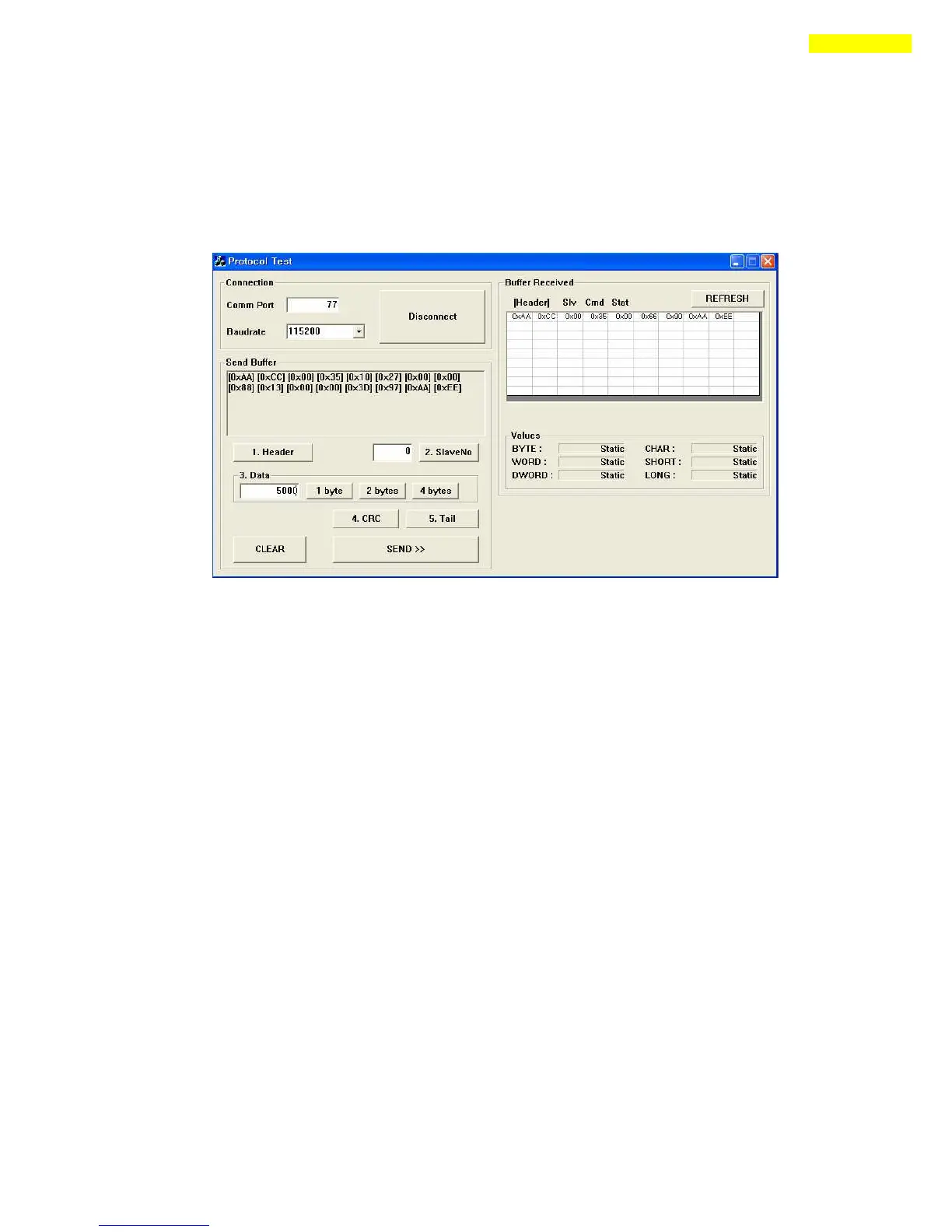
7) Tail: click ‘Tail’ and you can see ‘[0xAA][0xEE]’ on ‘Send Buffer’ window.
8)Finally click ‘Send’ button to send command characters to Ezi -SERVO Plus-R.
You can check the motor torque and LED flash for Servo ON status.
9)After sending command , you can check the answering information from Ezi-SERVO
Plus-R on ‘Buffer Received’ window.
(2)Motion command purpose of command
1) Header
2) Slave No.
3) Frame type: insert ‘53’ in 1 byte size for ‘Incremental Move’command.
4) Data (Position value): insert‘10000’and click ‘4byte’.
5) Data (Running speed): insert‘5000’and click ‘4 byte’.
6) CRC
7) Tail
8) Send: When parameter sets as ‘default’ value, motor rotates as one revolution. ‘53’
command is incremental move command so once click ‘Send’, motor will rotate again as
same distance.
(3)PLC Programming
In ‘Protocol test GUI’ automatically calculate the ‘ Byte stuffing’ and ‘CRC’ data.
For protocol programming in PLC, you have to add the function of ‘Byte stuffing’ and
‘CRC’ calculation.
For ‘Byte stuffing’ refer to ‘1-1-2. RS-485 Communication Protocol ’ and for ‘CRC’ refer
to ‘1-1-3. CRC Calculation Example ’ on UserManual(Ezi-STEP Plus-R)_Communication
Function.

 Loading...
Loading...