6 Technical Data
6.1 GS18 Technical Data
6.1.1 Tracking Characteristics
Multi-frequency
☞
Depending on the satellite systems and signals congured, a max-
imum number of 555 channels is allocated.
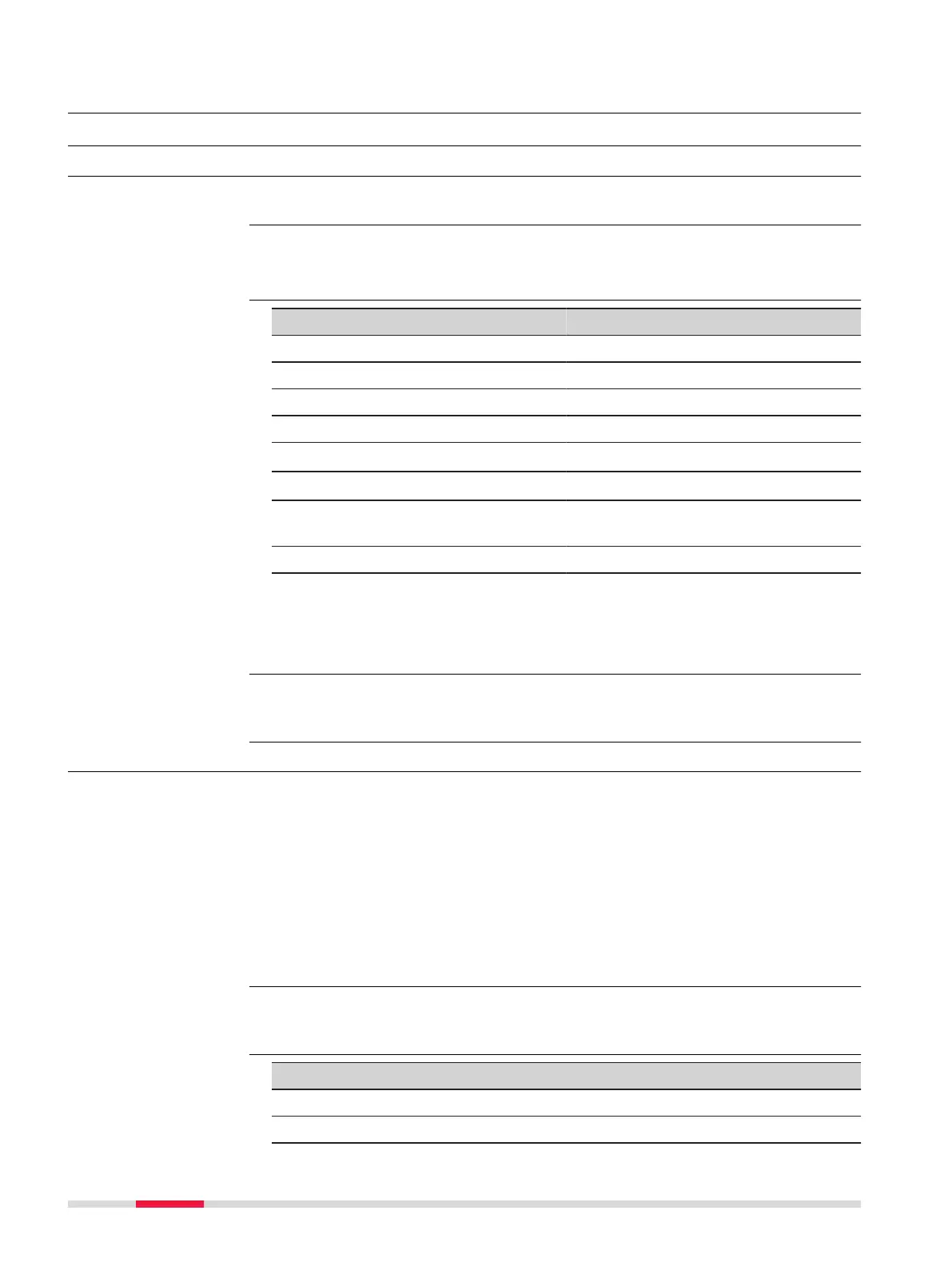
System Signal
GPS L1, L2, L2C, L5
GLONASS L1, L2, L2C, L3
Galileo E1, E5a, E5b, AltBOC, E6
BeiDou B1I, B1C, B2I, B2A, B3I
QZSS
L1, L2C, L5, L6
*
NavIC
L5
*
SBAS
(WAAS, EGNOS, MSAS, GAGAN)
L1, L5*
Terrastar L-band
* QZSS L6 and SBAS L5 will be provided through future rmware
upgrade.
Support of NavIC is incorporated and will be provided through future
rmware upgrade.
Carrier phase and code measurements on L1, L2 and L5 (GPS) are fully inde-
pendent with AS on or off.
6.1.2 Accuracy
Accuracy is dependent upon various factors including the number of satellites
tracked, constellation geometry, observation time, ephemeris accuracy, iono-
spheric disturbance, multipath and resolved ambiguities.
The following accuracies, given as root mean square, are based on measure-
ments processed using Leica Innity and on real-time measurements.
The use of multiple GNSS systems can increase accuracy by up to 30% relative
to GPS only.
The baseline precision of a differential code solution for static and kinematic
surveys is 25 cm.
Type
Horizontal Vertical
Static and rapid static 3 mm + 0.5 ppm 5 mm + 0.5 ppm
Kinematic 8 mm + 1 ppm 15 mm + 1 ppm
Satellite reception
Instrument channels
Supported signals
☞
☞
Differential code
Differential phase in
post-processing
52 Technical Data

 Loading...
Loading...







