5-26
5-6 Fully-closed Control
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
5
Basic Control Mode
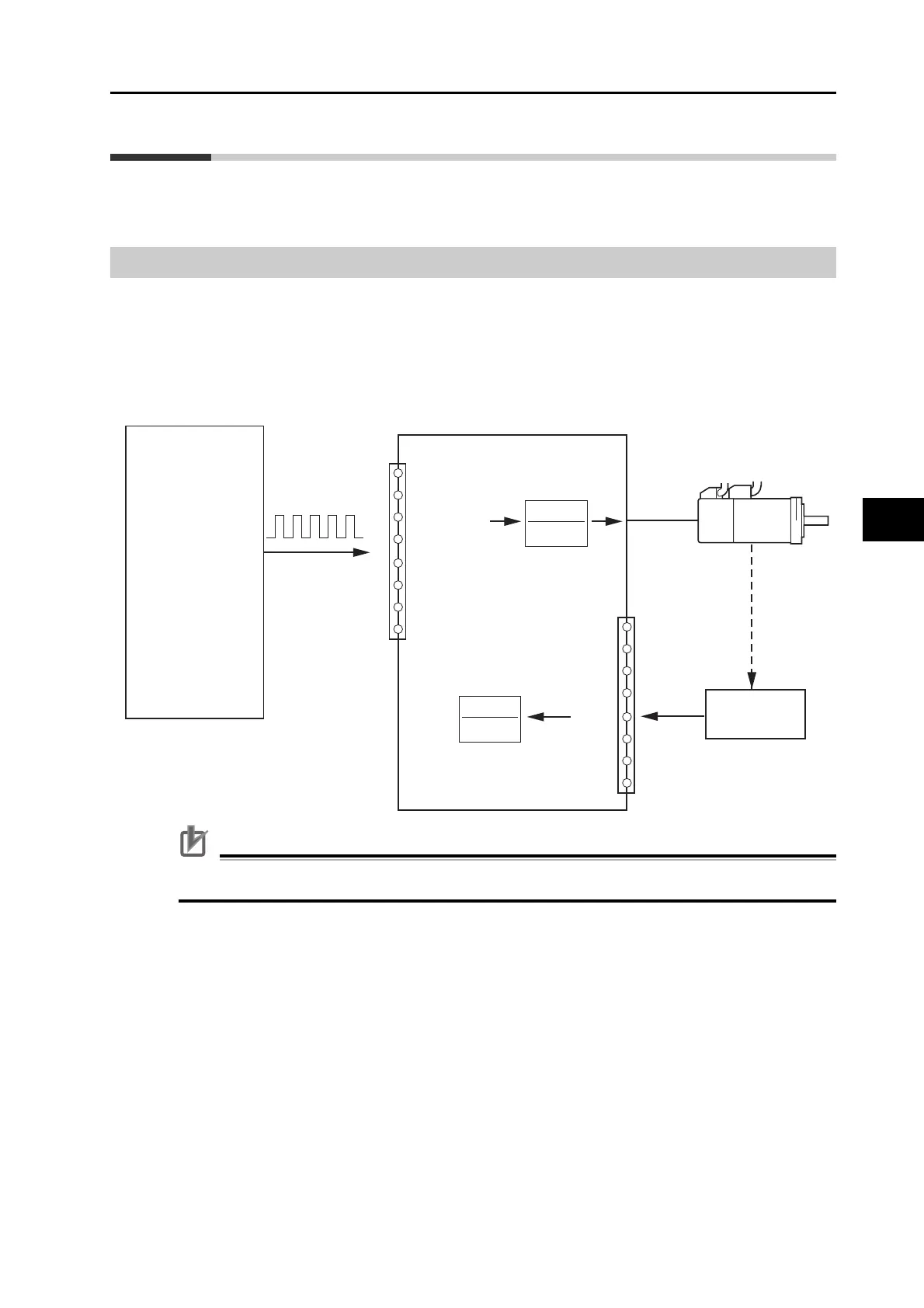
5-6 Fully-closed Control
Outline of Operation
An externally provided encoder is used to directly detect the position of the control target and
feedback the detected machine position to perform position control. This way, controls can be
performed without being affected by ball screw error, temperature changes, etc. You can achieve
highly accurate positioning by configuring a fully-closed control system.
Precautions for Correct Use
You cannot connect an external encoder with absolute encoder specifications.
Drive
OMNUC G5
Motor
OMNUC G5
External
encoder
Controller
(pulse train output type)
Pulse train
+CW
−CW
+CCW
−CCW
3
4
5
6
+CWLD
−CWLD
+CCWLD
−CCWLD
44
45
46
47
Electronic gear
(Pn008 to Pn010)
Numerator
Denominator
Fully-closed Control Mode
External Encoder Dividing Ratio
(Pn324 to Pn325)
Numerator
Denominator
Position Control Unit
CJ1W-NC113/133
CJ1W-NC213/233
CJ1W-NC214/414
CJ1W-NC234/434
CJ1W-NC413/433
CS1W-NC113/133
CS1W-NC213/233
CS1W-NC413/433
CPU Unit with built-in
pulse I/O
CJ1M-CPU21/22/23
CP1H-X/XA/Y
CP1L-M/L
Position
detection
+EXB
−EXB
+EXZ
−EXZ
+EXS
CN4
CN1
−EXS
+EXA
−EXA
 Loading...
Loading...






