8-60
8-7 Special Parameters
OMNUC G5-SERIES AC SERVOMOTOR AND SERVO DRIVE USER'S MANUAL
8
Parameter Details
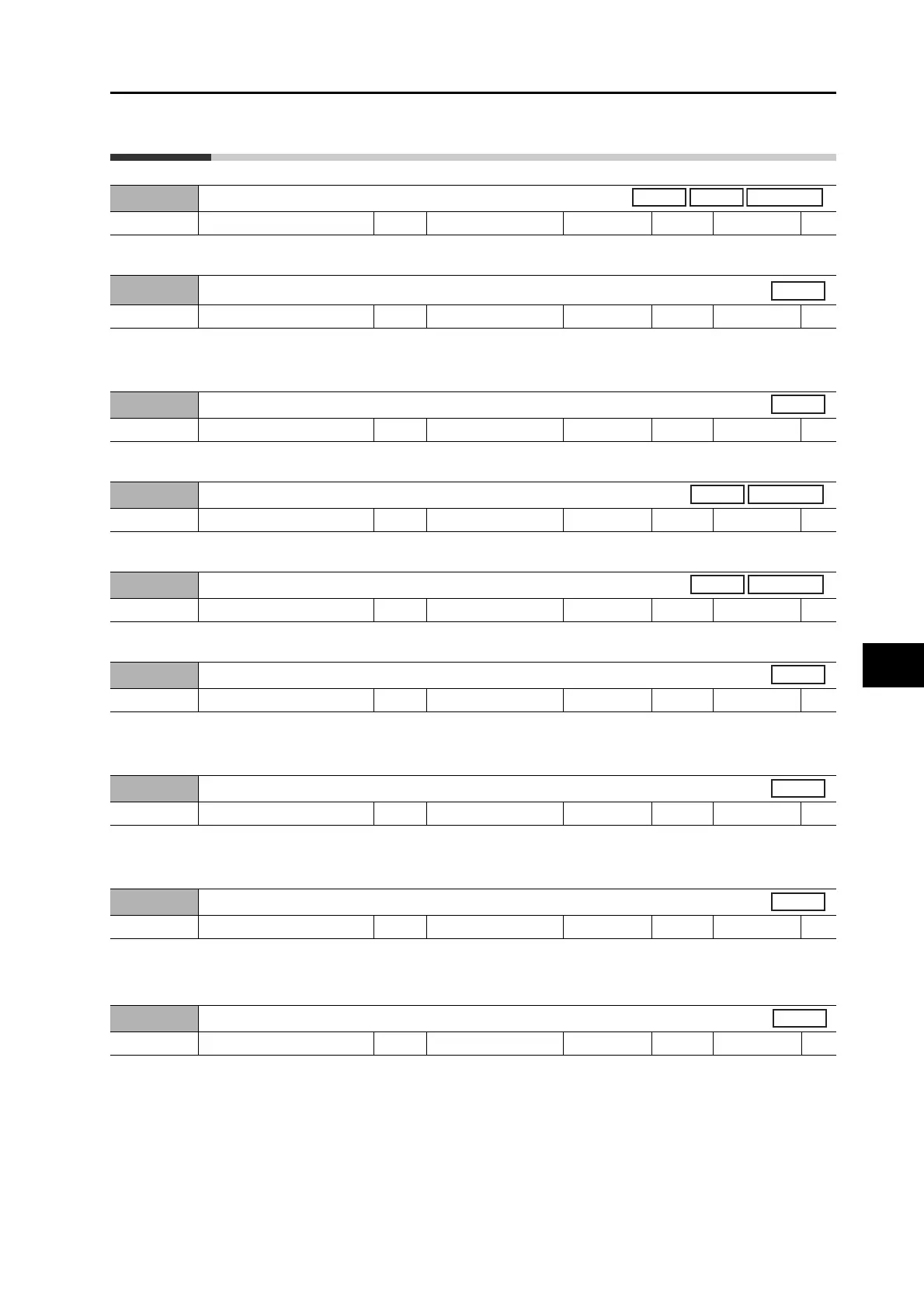
8-7 Special Parameters
Set the input gain for analog torque feed-forward. 0 to 9 will disable the function.
Set the detection level for excessive speed error (alarm 24.1).
If 0 is set, excessive speed error will not be detected.
Set the command speed during JOG trial operation (speed control).
Set effective time of gain 3 of 3-step gain switching.
Set gain 3 as a multiple of gain 1.
Set offset torque to add to torque command.
This object is set as a percentage of the rated torque.
Set the value to add to the torque command in the forward direction operation.
This object is set as a percentage of the rated torque.
Set offset torque to add to torque command for reverse direction operation.
This object is set as a percentage of the rated torque.
Pn600
Analog Torque Feed-forward Gain Setting
Setting range
0 to 100 Unit 0.1 V/100%
Default setting
0
Power OFF and ON
−
Position
Speed
Fully-closed
Pn602
Excessive Speed Error Setting
Setting range
0 to 20000 Unit r/min
Default setting
0
Power OFF and ON
−
Pn604
Jog Speed
Setting range
0 to 500 Unit r/min
Default setting
300
Power OFF and ON
−
Pn605
Gain 3 Effective Time
Setting range
0 to 10,000 Unit 0.1 ms
Default setting
0
Power OFF and ON
−
Position
Fully-closed
Pn606
Gain 3 Ratio Setting
Setting range
100 to 1,000 Unit %
Default setting
100
Power OFF and ON
−
Position
Fully-closed
Pn607
Torque Command Value Offset
Setting range
−100 to 100 Unit %
Default setting
0
Power OFF and ON
−
Pn608
Forward Direction Torque Offset
Setting range
−100 to 100 Unit %
Default setting
0
Power OFF and ON
−
Pn609
Reverse Direction Torque Offset
Setting range
−100 to 100 Unit %
Default setting
0
Power OFF and ON
−
Pn610
Function Expansion Setting
Setting range
0 to 63 Unit −
Default setting
0
Power OFF and ON
−
 Loading...
Loading...






