Chapter 5
5-9
Troubleshooting
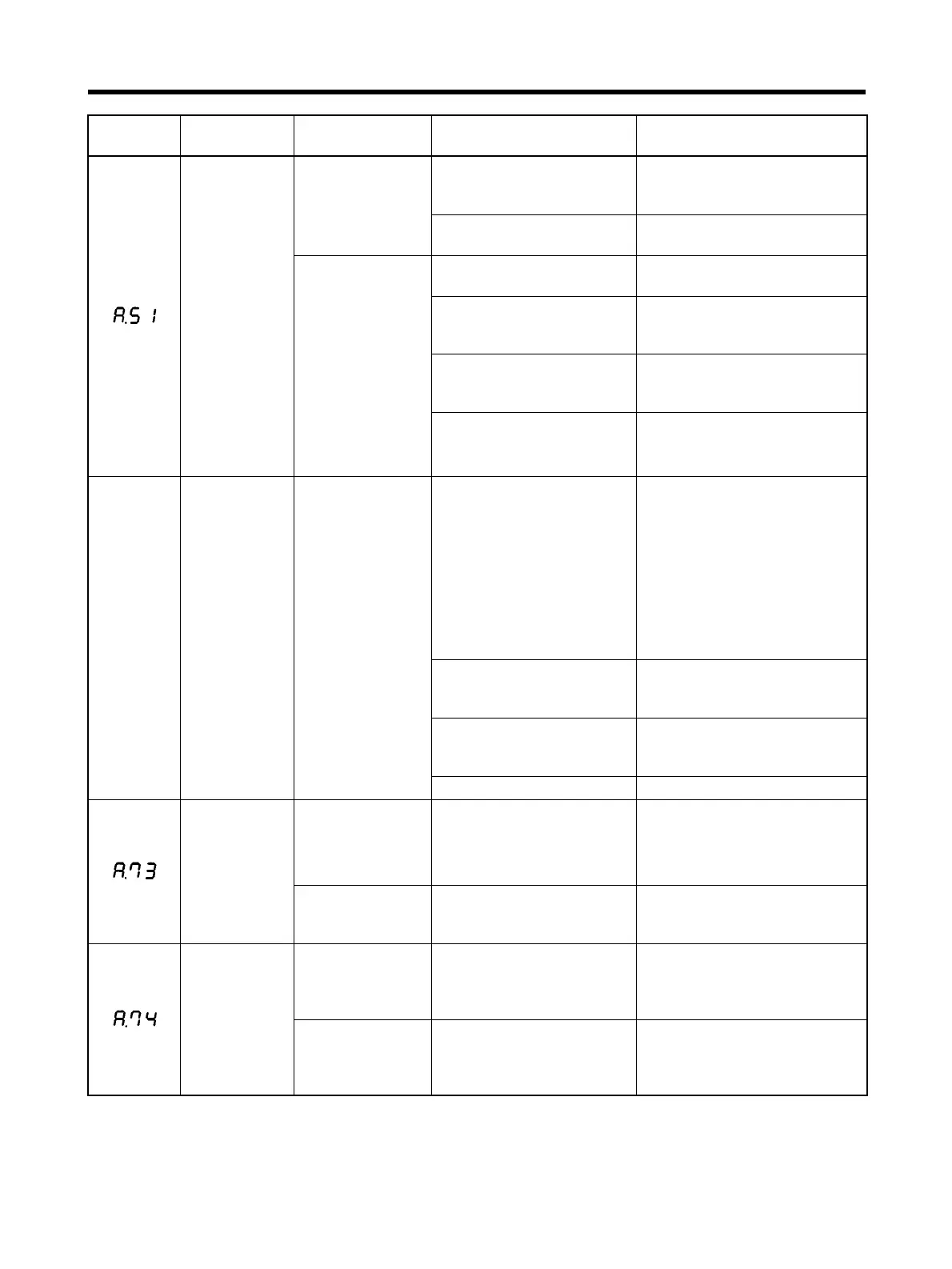
Overspeed Occurs when the
servo is ON.
Encoder signal between
controllers is wired incor-
rectly.
Rewire correctly.
Servomotor power line is
wired incorrectly.
Rewire correctly.
Occurs along with
high-speed rota-
tion when a com-
mand is input.
Position command input
exceeds 4,500 r/min.
Input command values cor-
rectly.
Pn202 and Pn203 (elec-
tronic gear ratio) setting is
too large.
Set the parameters correctly.
Resolution setting switch
(switches 4 and 5) setting is
too low.
Reset the switches correctly.
Rotation limit has been
exceeded due to over-
shooting.
Adjust the gain.
Lower the maximum specified
speed.
Overload Occurs during
operation.
Running at over 120% of
rated torque (effective
torque).
Repair the Servomotor shaft if
it is locked.
If the Servomotor power line is
wired incorrectly, rewire it cor-
rectly.
Lighten the load.
Lengthen the acceleration and
deceleration times.
Adjust the gain.
Power supply voltage has
fallen.
Check the power supply volt-
age, and lower to within toler-
ance range.
Servomotor winding is
burned out.
Check the winding resistance.
Replace the Servomotor if the
winding is burned out.
Servo Driver is burned out. Replace the Servo Driver.
Dynamic
brake over-
load
Occurs when the
servo is turned
OFF after operat-
ing.
Energy required for stop-
ping exceeds the dynamic
brake resistor tolerance.
Lower the rotation speed.
Reduce the load inertia.
Reduce the frequency of
dynamic brake use.
Occurs when the
power supply is
turned ON.
Control panel error Replace the Servo Driver.
Inrush resis-
tance overload
Occurs when the
main circuit power
supply is turned
ON.
The frequency by which
main-circuit power supply is
turned ON and OFF
exceeds 5 times/min.
Reduce the frequency by which
the main circuit power supply is
turned ON and OFF.
Occurs when the
control circuit
power supply only
is turned ON.
Control panel error Replace the Servo Driver.
Display Error Status when
error occurs
Cause of error Countermeasures
a.7 0
 Loading...
Loading...



