Publication 2098-IN005C-EN-P — March 2008
Minimizing the Effects of Feedback Signal Loss 145
routines. This technique lets you specify velocity error limit settings in
cases where the default settings do not suit the application.
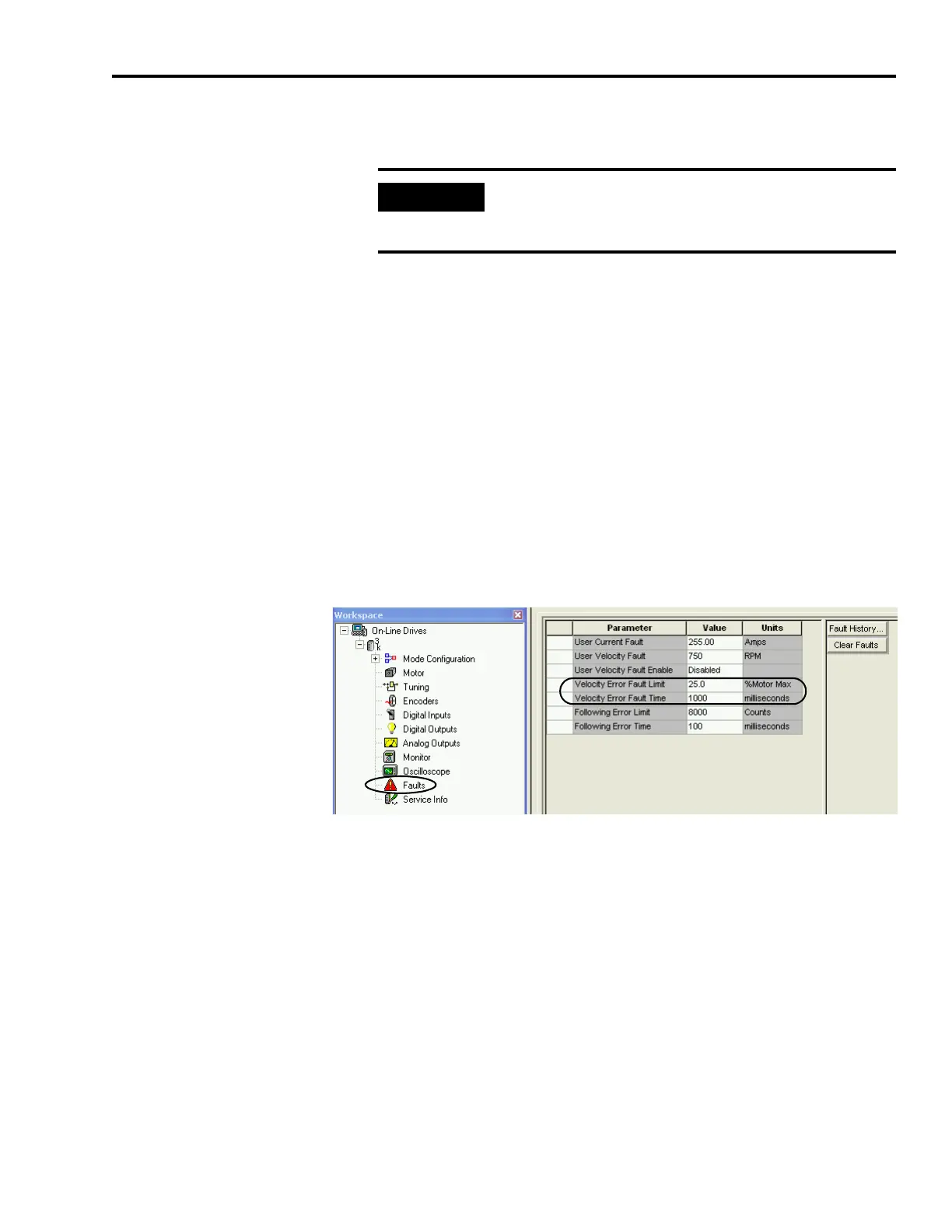
For Ultra3000 drives used with Ultraware software, you can configure
the Velocity Error Fault Limit parameter found in the Faults branch of
the main menu. The range for this parameter is 1…100% of maximum
motor speed, with a default value of 25%. Adjust the Velocity Error
Fault Time parameter to specify a ride-through time for the Velocity
Error Fault Limit parameter. The range for this parameter is 0…65,535
ms, with a default value of 1000 ms.
The Velocity Error Fault Limit parameter is being monitored even
when the drive is used in position mode. In this case, the velocity
command is the output of the position loop, not the rate of change of
the position command. If the position error is large, the output of the
position loop, which is also the velocity command, is large. This
results in a large velocity error.
Ultraware Velocity Error Fault Parameters
Configuring Fault Actions in
RSLogix 5000 Software
The sole purpose of adjusting the position and velocity error limit
settings to within a tighter range is to detect a position or velocity
error fault condition early. This lets you proceed with an appropriate
fault action and reduce the distance and duration of unexpected
motion. When the position error limit setting is met or exceeded, an
Excess Position error (E19) is indicated by the drive. When using
Ultraware software, this results in the drive disabling and the axis
coasting to a stop. However, when using RSLogix 5000 software, this
results in a corresponding fault action that you configure. The
response to an Excess Velocity error (E24) in Ultraware software, is
the same as that of E19, but is not readily programmable in
RSLogix 5000 software. When necessary, you can program fault
actions resulting from excess velocity error with additional code.
To make use of the VelocityError attribute, you must select it as
one of the two RealTimeAxis Information attributes under the
Drive/ Motor tab in the Axis Properties dialog.

 Loading...
Loading...










