Parameters
4.2 Motor control
SIMOCODE pro - Parameterize
Operating Manual, 04/2017, A5E40507630002A/RS-AA/001
107
"Positioner" control function
Description
SIMOCODE pro can control positioners / actuators with this function. The positioner is
moved into the corresponding end position with the "OPEN" and "CLOSED" control
commands and is deactivated via its limit switches (1-active) or torque switches (0-active).
The response of the limit / torque switches must be passed to SIMOCODE pro via its inputs.
●
Start with "ON >" activates contactor control QE1 until "End position OPEN" is
reached (Feedback OPEN)
●
Start with "ON <" activates contactor control QE2 until "End position CLOSED" is
reached (Feedback CLOSED)
●
with "OFF" deactivates the contactor controls. The drive remains in the present
position.
The control commands can be issued to SIMOCODE pro from any control stations (see also
the description of "control stations"). Thus, the inputs (plugs) must be connected to the
corresponding sockets, preferably to the "Enabled control command" sockets.
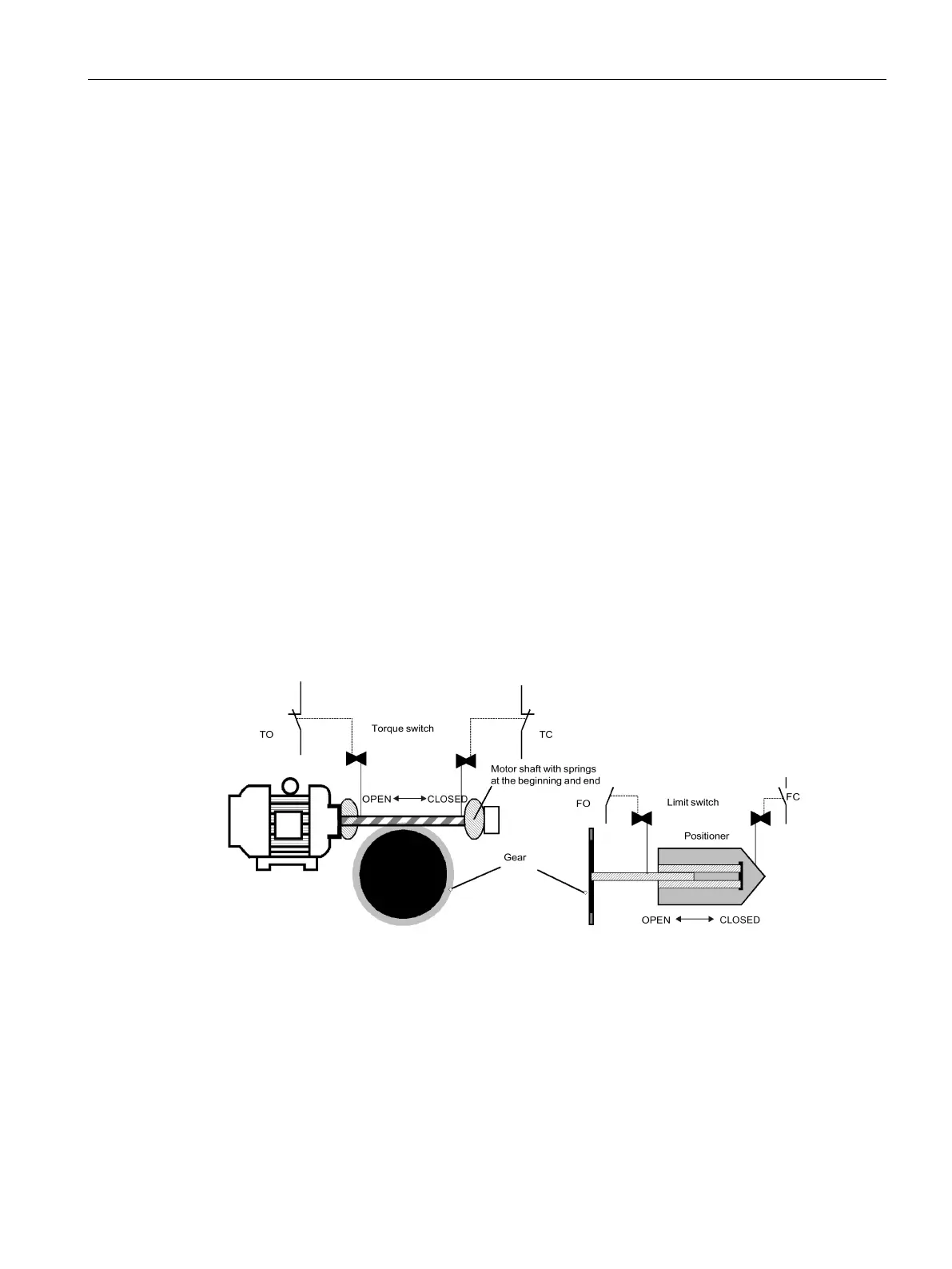
Figure 4-25 Function schematic of the torque and limit switches when controlling positioners

 Loading...
Loading...








