2 Installation and commissioning
2.5.4. Manually releasing the brakes
833HAC022033-001 Revision: K
© Copyright 2004-2011 ABB. All rights reserved.
2.5.4. Manually releasing the brakes
General
This section details how to release the holding brakes of each axis motor.
The brakes may be released by:
• Internal brake release unit: using push buttons on the robot. This requires either the
controller to be connected or that power is supplied to the R1.MP connector, according
to the section Supplying power to connector R1.MP on page 85.
• External brake release unit: using push buttons on an external brake release unit. This
does NOT require the controller to be connected. The external unit is used when there
are no push buttons on the robot. Read about how to use the external brake release unit
in the section Manually releasing the brakes, external brake release unit on page 86
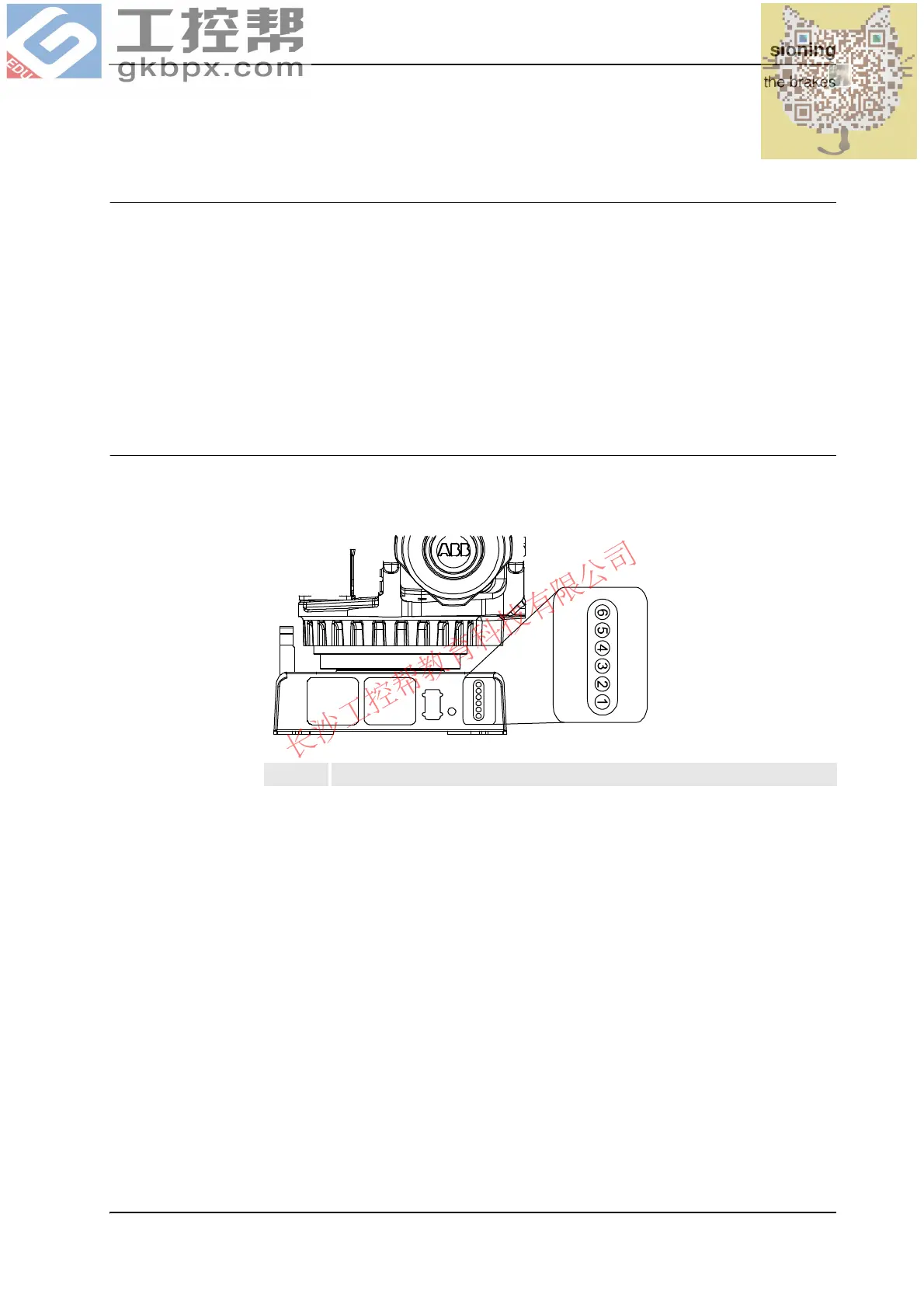
Location of brake release unit at base
The internal brake release unit is located either at the base or at the frame. The figure below
shows the unit located at the base.
xx0200000375
- Internal brake release unit with push buttons, located on the robot base
Continues on next page
 Loading...
Loading...









