Safety
Information
Product
Information
Mechanical
Installation
Electrical
Installation
Getting
Started
Basic
parameters
Running the
Motor
Optimization
SMARTCARD
Operation
Onboard
PLC
Advanced
Parameters
Technical
Data
Diagnostics
UL
Information
64 Quantum MP User Guide
www.emersonct.com Issue: A4
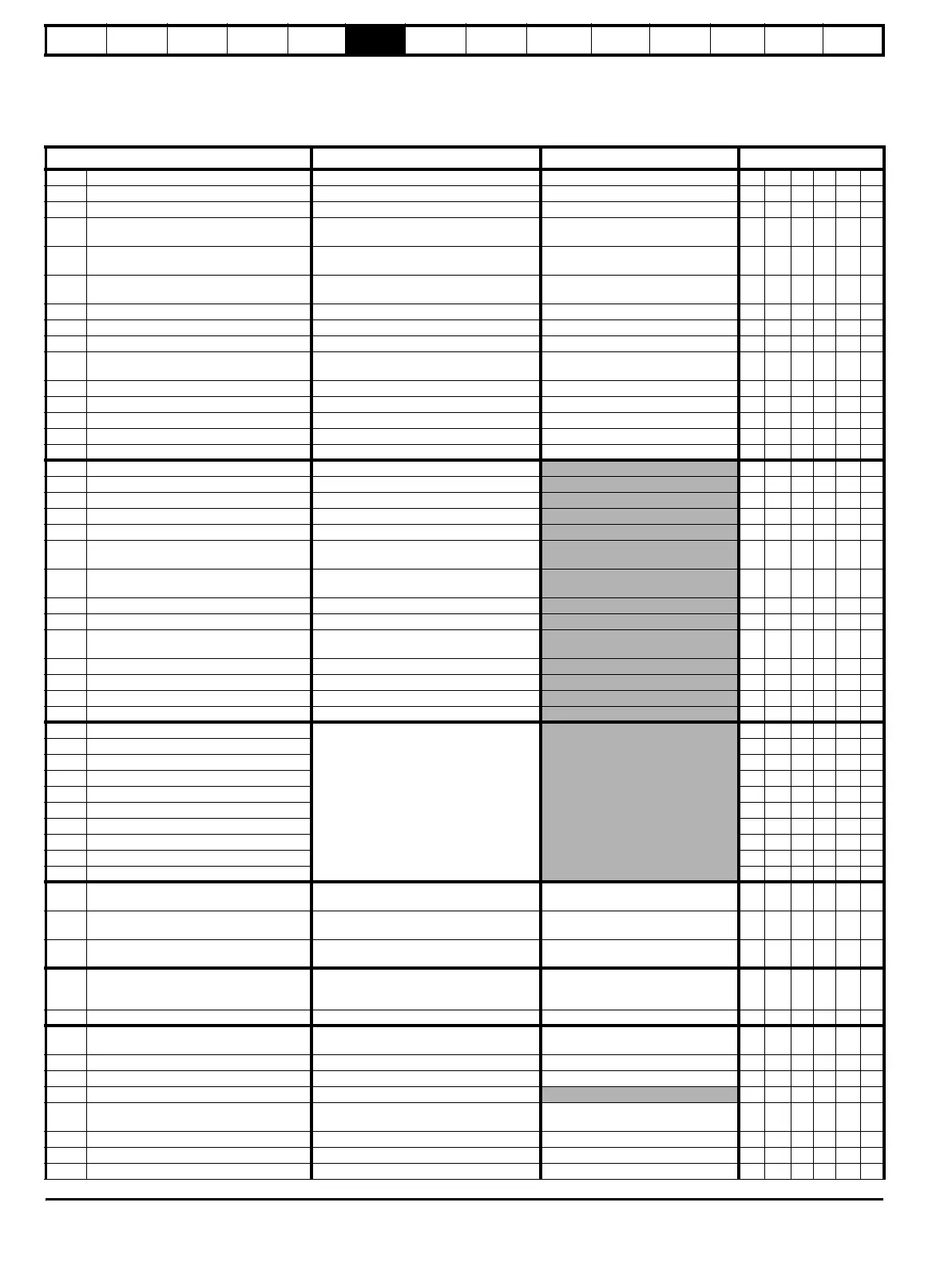
6 Basic parameters
The pre-defined sub blocks contain commonly used parameters for basic set-up of the Quantum MP. All parameters in the pre-defined sub blocks
appear in other menus in the drive. (Denoted by {x.xx} in Table 6-1.)
Table 6-1 Pre-defined sub block parameters
Parameter
Range(
) Default()
Type
SE00 Parameter zero {0.21, x.00} 0 to 32,767 0 RW Uni
SE01 Minimum reference clamp {0.22, 1.07} ±SPEED_LIMIT_MAX rpm 0.0 RW Bi PT US
SE02 Maximum reference clamp {0.23, 1.06} SPEED_LIMIT_MAX rpm 1000.0 RW Bi US
SE03 Acceleration rate {0.24, 2.11}
0 to MAX_RAMP_RATE
s/(SE02 [Pr 0.23, 1.06] or Pr 2.39)
5.000 RW Uni US
SE04 Deceleration rate {0.25, 2.21}
0 to MAX_RAMP_RATE
s/(SE02 [Pr 0.23, 1.06] or Pr 2.39)
5.000 RW Uni US
SE05 Reference selector {0.26, 1.14}
A1.A2 (0), A1.Pr (1), A2.Pr (2), Pr (3), PAd
(4), Prc (5), PAd rEF (6)
A1.A2 (0) RW Txt US
SE06 Armature rated voltage {0.27, 5.09} 0 to ARMATURE_VOLTAGE_MAX Vdc For 480V drive: 440 Eur 500 USA RW Uni RA US
SE07 Motor rated current {0.28, 5.07} 0 to RATED_CURRENT_MAX A RATED_CURRENT_MAX RW Uni RA US
SE08 Base speed {0.29, 5.08} 0.0 to 10,000.0 rpm 1000.0 RW Uni US
SE09 Parameter copying {0.30, 11.42}
nonE (0), rEAd (1), ProG (2), Auto (3),
boot (4)
nonE (0) RW Txt * NC
SE10 Rated field current {0.31, 5.70} 0 to FIELD_CURRENT_SET_MAX Size:Eur:2A, US: 8A RW Uni PT US
SE11 Rated field voltage {0.32, 5.73} 0 to 500 Vdc Eur: 360, USA: 300 RW Uni PT US
SE12 Enable field control {0.33, 5.77} OFF (0) or On (1) OFF (0) RW Txt US
SE13 Autotune {0.34, 5.12} 0 to 3 0 RW Uni NC
SE14 Security status {0.35, 11.44} L1 (0), L2 (1), Loc (2) L1 (0) RW Txt PT US
di01 Speed reference selected {0.36, 1.01} ±MAX_SPEED_REF rpm RO Bi NC PT
di02 Pre-ramp reference {0.37, 1.03} ±MAX_SPEED_REF rpm RO Bi NC PT
di03 Post ramp reference {0.37, 1.03} ±SPEED_MAX rpm RO Bi NC PT
di04 Final speed reference {0.39, 3.01} ±SPEED_MAX rpm RO Bi FI NC PT
di05 Speed feedback {0.40, 3.02} ±SPEED_MAX rpm RO Bi FI NC PT
di06 Speed controller output {0.41, 3.04}
±TORQUE_PRODUCT_
CURRENT_MAX rpm
RO Bi FI NC PT
di07 Torque demand {0.42, 4.03}
±TORQUE_PROD_
CURRENT_MAX %
RO Bi FI NC PT
di08 Current magnitude {0.43, 4.01} 0 to DRIVE_CURRENT_MAX A RO Uni FI NC PT
di09 Field current feedback {0.44, 5.56} ±50.00A RO Bi FI NC PT
di10 Armature voltage {0.45, 5.02}
±ARMATURE_VOLTAGE_
MAX V
RO Bi FI NC PT
di11 Reference enabled indicator {0.46, 1.11} OFF (0) or On (1) RO Bit NC PT
di12 Reverse selected indicator {0.47, 1.13} OFF (0) or On (1) RO Bit NC PT
di13 Jog selected indicator {0.48, 1.14} OFF (0) or On (1) RO Bit NC PT
di14 Software version {0.49, 11.29} 1.00 to 99.99 RO Uni NC PT
tr01 Trip 0 {0.51, 10.20}
0 to 229
RO Txt NC PT
tr02 Trip 1 {0.52, 10.21} RO Txt NC PT
tr03 Trip 2 {0.53, 10.22} RO Txt NC PT
tr04 Trip 3 {0.54, 10.23} RO Txt NC PT
tr05 Trip 4 {0.55, 10.24} RO Txt NC PT
tr06 Trip 5 {0.56, 10.25} RO Txt NC PT
tr07 Trip 6 {0.57, 10.26} RO Txt NC PT
tr08 Trip 7 {0.58, 10.27} RO Txt NC PT
tr09 Trip 8 {0.59, 10.28} RO Txt NC PT
tr10 Trip 9 {0.60, 10.29} RO Txt NC PT
SP01
(Kp1) Speed controller
proportional gains
{0.61, 3.10} 0.0000 to 6.5535 (1 / (rad/s)) 0.0300 RW Uni US
SP02
(Ki1) Speed controller
integral gains
{0.62, 3.11} 0.00 to 655.35 (s / (rad/s)) 0.10 RW Uni US
SP03
(Kd1) Speed controller
differential feedback gains
{0.63, 3.12}
0.00000 to 0.65535
(1/s / (rad/s))
0.00000 RW Uni US
Si01 Serial comms baud rate {0.61, 11.25}
300 (0), 600 (1), 1200 (2), 2400 (3), 4800 (4),
9600 (5), 19200 (6), 38400 (7), 57600 (8)**,
115200 (9)**
19200 (6) RW Txt US
Si02 Serial comms address {0.67, 11.23} 0 to 247 1 RW Uni US
Fb01 Speed feedback selector {0.71, 3.26}
drv (0), Slot1 (1), Slot2 (2), Slot3 (3), Tach
(4), Est SPEED (5)
Est SPEED (5) RW Txt US
Fb02 tachometer voltage rating {0.72, 3.51} 0 to 300.00 V/1000 rpm Eur: 60.00, USA: 50.00 RW Uni US
Fb03 tachometer input mode {0.73, 3.53} DC (0), DC Filt (1), AC (2) DC (0) RW Txt US
Fb04 tachometer speed feedback {0.74, 3.52} ±SPEED_MAX rpm RO Bi FI NC PT
Fb05
Drive encoder lines per
revolution
{0.75, 3.34} 1 to 50,000 1,024 RW Uni US
Fb06 Drive encoder supply voltage {0.76, 3.36} 5V (0), 8V (1), 15V (2), 24V (3) 5V (0) RW Txt US
Fb07 Drive encoder type {0.77, 3.38} Ab (0), Fd (1), Fr (2) Ab (0) RW Txt US
Fb08
Drive encoder termination select
{0.78, 3.39} 0 to 2 1 RW Uni US
 Loading...
Loading...



