3. TARGET TRACKING (TT)
3-11
Ground stabilization and sea stabilization
Target vectors can be ground stabilized or sea stabilized in the True Motion mode. To
select speed over the ground or speed through the water data, open the page from the
menu. Select for ground stabilization or for sea stabilization. The vector mode indica-
tion shows the stabilization mode in the true motion as [TRUE-G] or [TRUE-S].
Sea stabilization is a mode where own ship and all targets are referenced to the sea
using a compass heading and single-axis log water speed inputs in the true motion
mode. Ground stabilization is a mode where own ship and all targets are referenced
to the ground using the ground track or set and drift inputs. If the accuracy seems un-
satisfactory, enter set and drift corrections. Note that set and drift should not be used
when the radar is displaying AIS targets.
True vector
In the true motion mode, all fixed targets such as land, navigational marks and ships
at anchor remain stationary on the radar screen with vector length zero. But in the
presence of wind and/or current, the vectors appear on fixed targets representing the
reciprocal of set and drift affecting own ship unless set and drift values are properly
entered.
In the true vector mode, there are two types of stabilization: ground stabilization
(TRUE-G) and sea stabilization (TRUE-S). The stabilization mode is automatically se-
lected according to speed selection, as shown in the table below. Manual selection is
available from the [SPD] menu at the top-right of the screen.
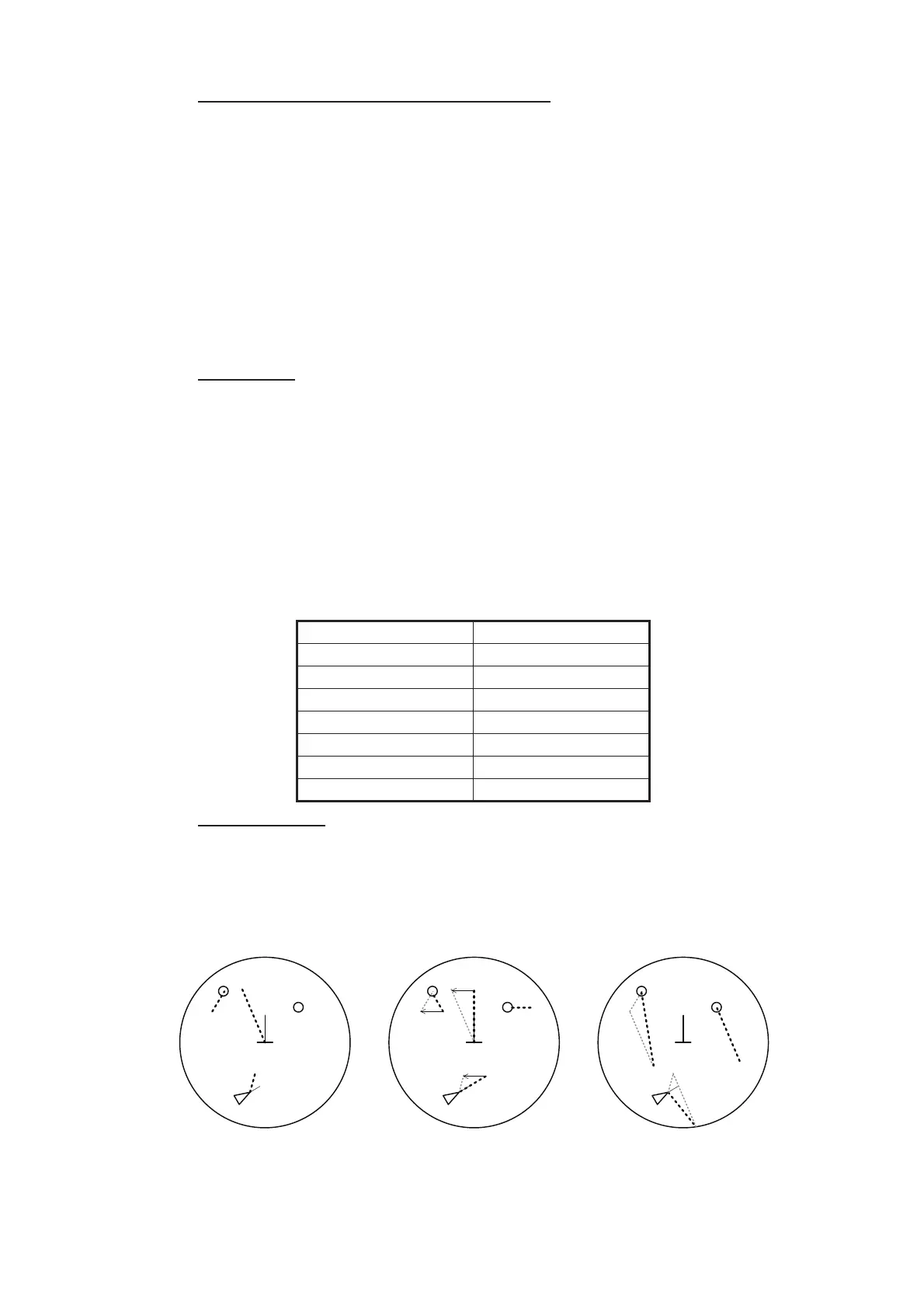
Relative vector
Relative vectors on targets that are not moving over the ground such as land, naviga-
tional marks and ships at anchor will represent the reciprocal of own ship's ground
track. A target whose vector passes through own ship is on a collision course. (Dotted
lines in the figure are for explanation only.)
Speed selection True vector mode
LOG(WT) TRUE-S
LOG(WTC) TRUE-G
LOG(BT) TRUE-G
GPS(BT) TRUE-G
REF(BT) TRUE-G
MAN(WT) TRUE-S
MAN(WTC) TRUE-G
Buoy
Own Ship
True vectors in ground
stabilization
AIS
Buoy
Own Ship
True vectors in sea
stabilization
TT
AIS
TT
Buoy
Own Ship
Relative vectors
AIS
TT
Current
(Set and drift)

 Loading...
Loading...


