42
LBK System| Instruction manual v1.3 SEP 2019 |LBK-System_instructions_en v1.3|© 2018-2019 Inxpect SpA
6.4 Other applications
6.4.1 Types of applications
Thanks to the manual configuration mode, different shaped areas can be monitored. Flexibility in sensors
configuration allows obtaining maximum coverage in dangerous areas.
6.4.2 Calculation of the monitored area
In the configuration phase, based on the area to be monitored (see "Dangerous area calculation" on page27),
the designer must define:
l the number of sensors
l the distance between sensors
l sensors inclination
l the depth of the stopping area
l the depth of the possible pre-alarm area
WARNING! It is the responsibility of the designer to calculate the actual monitored area (total
depth = dangerous area + pre-alarm area; total width = dangerous area + distance of possible side
delimiting barriers) and to install guards and/or delimiting barriers to prevent access and/or false
alarms.
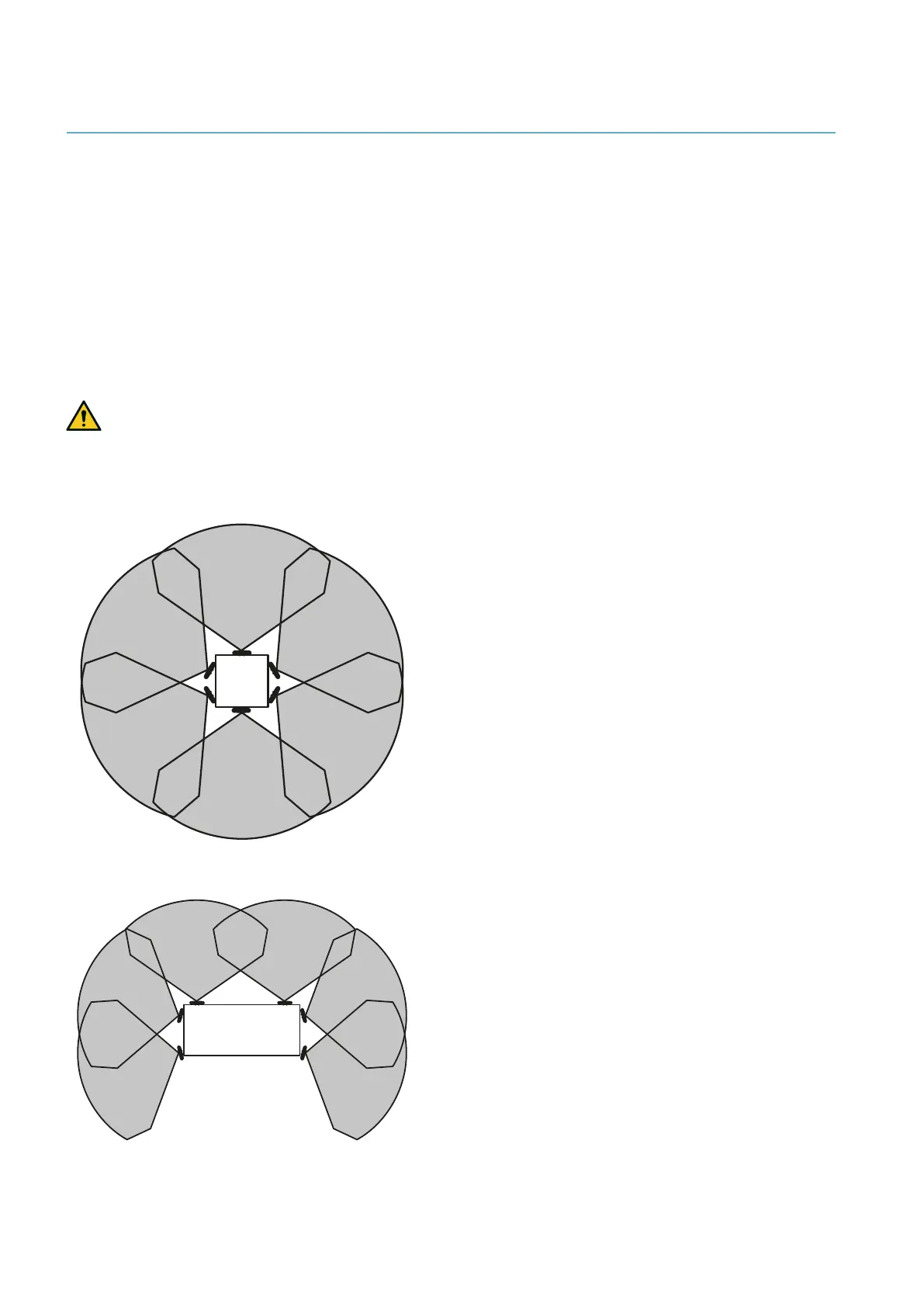
6.4.3 Examples
Circular dangerous area around a robot
Dangerous area on three sides out of four of a machinery
6. Applications

 Loading...
Loading...
