Lenze · 8400 BaseLine C · Reference manual · DMS 1.6 EN · 01/2014 · TD05 155
8 Diagnostics & error management
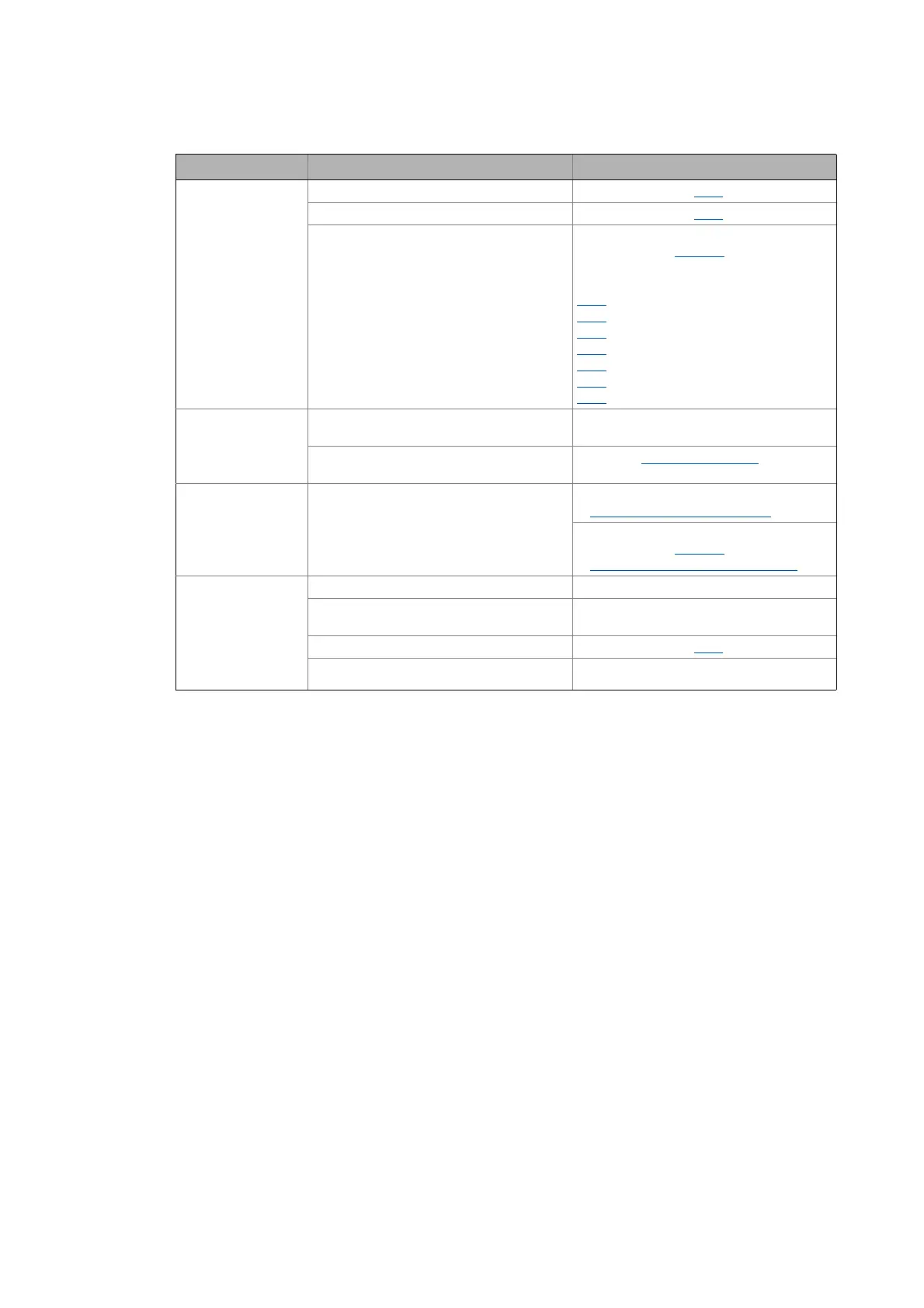
8.6 Maloperation of the drive
_ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _ _
Motor consumes too
much current
U
min
boost has been selected too high Correct setting with C016
V/f base frequency has been selected too low Correct setting with C015
Rated motor data (stator resistance, speed,
current, frequency, voltage) and cos ϕ and/
or magnetising inductance is not adapted to
the motor data
Carry out automatic motor parameter identi-
fication with the C002/23
device command
- or -
Adjust motor parameters manually:
C084
: Motor stator resistance
C087
: Rated motor speed
C088
: Rated motor current
C089
: Rated motor frequency
C090
: Rated motor voltage
C091
: Motor cosine phi
C092
: Motor magnetising inductance
Motor parameter
identification is abor-
ted with error LP1
Motor is too small compared to the rated de-
vice power (>1 : 3)
Use device with lower rated power
DC injection braking (DCB) is active via termi-
nal
Deactivate DC-injection braking
Drive behaviour with
vector control is not
satisfactory
different Optimise or manually adapt vector control
Sensorless vector control (SLVC)
Carry out automatic motor parameter identi-
fication with the C002/23
device command
Automatic motor data identification
Torque dip in field
weakening range
or
motor stalling when
being operated in the
field weakening ran-
ge
Motor is overloaded Check motor load
Motor windings are wired incorrectly Reverse from star connection to delta con-
nection
V/f base frequency is set too high Correct setting with C015
Mains voltage is too low Increase mains voltage
Maloperation Cause Remedy

 Loading...
Loading...







