5-49
5-10 User Parameters
5
Operating Functions
Set the input format of the pulse inputs sent as commands to the Servo Drive from the position
controller.
Explanation of Setting
Set the number of encoder pulses to be output from the Servo Drive for each rotation.
The setting can be made from 1 to 16,384 pulses, but the setting will not be valid if it exceeds 2,500
pulses. (Any setting that exceeds the encoder resolution will be invalid.)
Even if the dividing rate is changed, there will always be 1 pulse per rotation for phase Z.
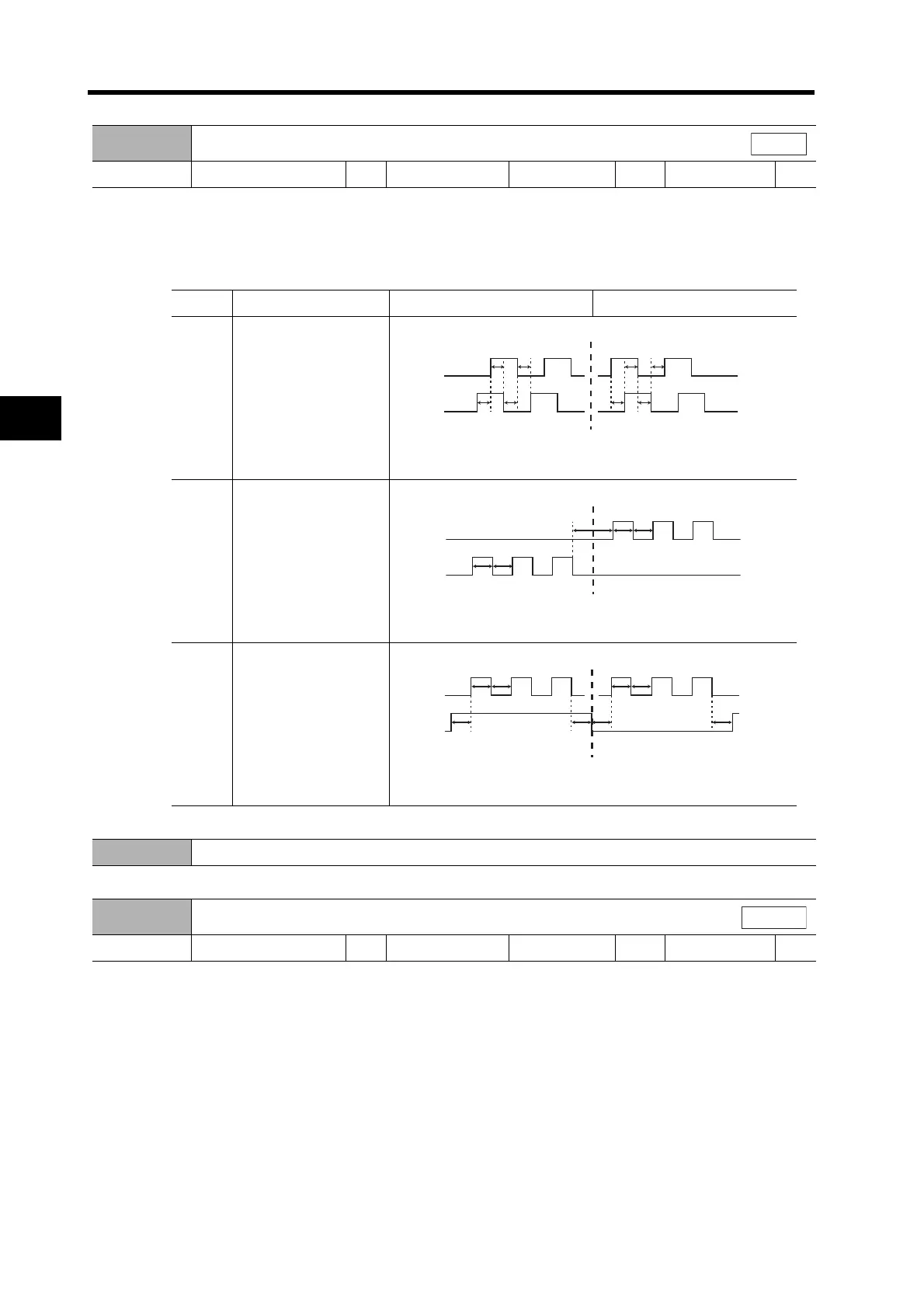
Pn42
Command Pulse Mode
Setting range 0 to 3 Unit --- Default setting 1
Power OFF → ON
Yes
Position
Setting Command pulse mode Servomotor forward command Servomotor reverse command
0 or 2
90° phase difference
(phases A and B)
signal inputs
Line driver: t1 ≥ 2 µs
Open collector: t1 ≥ 5 µs
1
Forward pulse and
reverse pulse inputs
Line driver: t2 ≥ 1 µs
Open collector: t2 ≥ 2.5 µs
3
Feed pulse input and
forward/reverse signal
Line driver: t2 ≥ 1 µs
Open collector: t2 ≥ 2.5 µs
t1 t1 t1 t1
t1 t1t1 t1
Phase A
Phase B
t2 t2
t2
t2
t2
Low
Low
t2
High
Low
t2t2
t2 t2 t2 t2
t2
Pn43 Not used. (Do not change setting.)
Pn44
Encoder Dividing Rate Setting
Setting range 1 to 16384 Unit Pulse Default setting 2500
Power OFF → ON
Yes
All modes
 Loading...
Loading...




