1.Select Continue.
Alistofconnecteddevicesisdisplayed.(i.
e.iTC-5,DSTortransducerpod)
2.Select
iT
C-5.
Alistofavailabletransducersisdisplayed,
3.Select
Compass.
4.Select
S
wingCompass.
5.Startmovingvesselinslowevencircles,thenpress
S
tart.
6.Keepvesselspeedbelow2knots.Watchthedisplaytoensureyourturnrateisnottoofast.If
themessage‘SlowDown—turnratetoofast’isdisplayedreduceyourrateofturn,thiscanbe
achievedbyslowingdownand/orsteeringinawidercircle.
Ifthe'SlowDown—turnratetoofast'messageisdisplayedthecurrentcirclewillhavetobe
repeated.
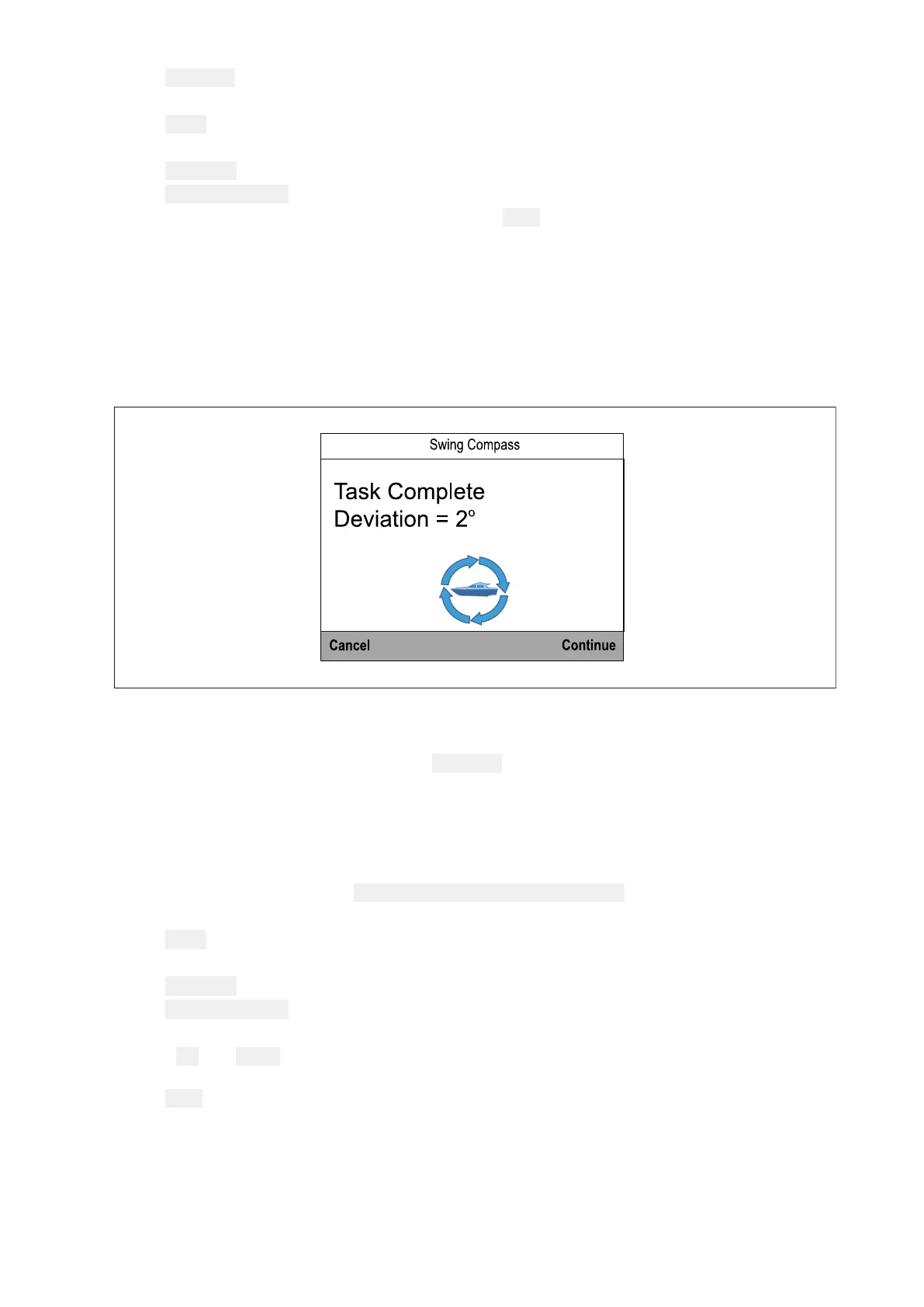
WhentheCompasshasbeensuccessfullycalibrated,amessagewillbedisplayedshowingthe
detectedcompassdeviation.
7 .Ifthedeviationisgreaterthan15degreesyouwillneedtorelocatetheCompassfartheraway
frommetalitemsoritemsthatmaycauseinterference,thenrepeatthecalibrationprocess.Ifyou
stillfindadeviationofmorethan15degrees,contactyourRaymarinedealerforadvice.Ifthe
deviationiswithinacceptablelimits,press
Continue.
SettingtheCompassOffset
Youcanmanuallyapplyanoffsettothecompassheadingbyfollowingthestepsbelow.
Toapplyanoffsetyourequireasourceofheadingsuchastheship’scompass.
FromtheTransducerSet-upmenu(
Menu>Set-up>TransducerSet-up:
1.EnsurethattheRudderiscentred
2.Select
iTC-5.
Alistofavailabletransducersisdisplayed.
3.Select
Compass.
4.SelectCompassOffset.
5.S
teeryourvesselonasteadycourse.
6.Usethe Upand Downbuttonstoadjustthecompassoffsetuntilthedisplayedheadingmatches
theheadingoftheship’scompass.
7.Select
Save.
40

 Loading...
Loading...