Parameters
4.2 Motor control
SIMOCODE pro - Parameterize
110 Operating Manual, 04/2017, A5E40507630002A/RS-AA/001
Types of positioner control
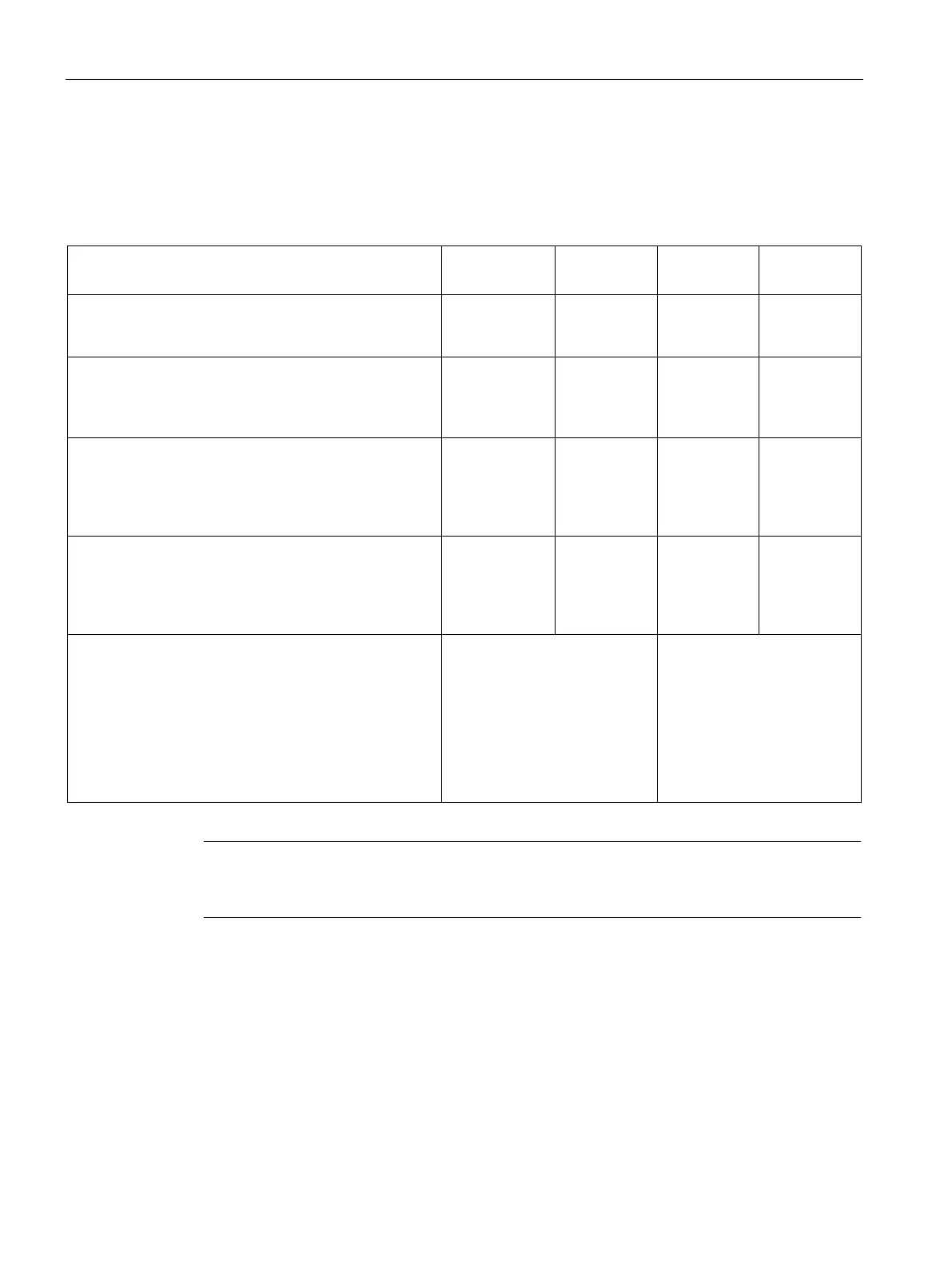
The following table shows the five types of positioner control:
Table 4- 21 Types of positioner control
After reaching the end position FO (OPEN) or
—
—
After reaching the end position FO (OPEN) or FC
(CLOSED) and response of the associated torque switch
After reaching the end position FO (OPEN). After
reaching end position (CLOSED), the respective torque
switch TC must also respond after the limit switch FC
—
After reaching the end position FC (CLOSED). After
reaching end position FO (OPEN), the respective torque
switch FO must also respond after the limit switch TO
—
After reaching the end position or the torque. The valve
actuator is monitored either just with the limit switches or
just with the torque switches. The switches are
implemented as change-over contacts and are checked
for antivalence. In the case of non-antivalent feedback
(e.g. FC=0 and TC=0), SIMOCODE pro detects an open
circuit and deactivates the positioner with the fault
message "Fault - Antivalence"
signals of the torque switches and the limit switches must be wired to the inputs of the
basic unit. Torque switches must be 0
-active, whereas the limit switches must be 1-active.

 Loading...
Loading...








