Maintenance and inspection
9
- 71
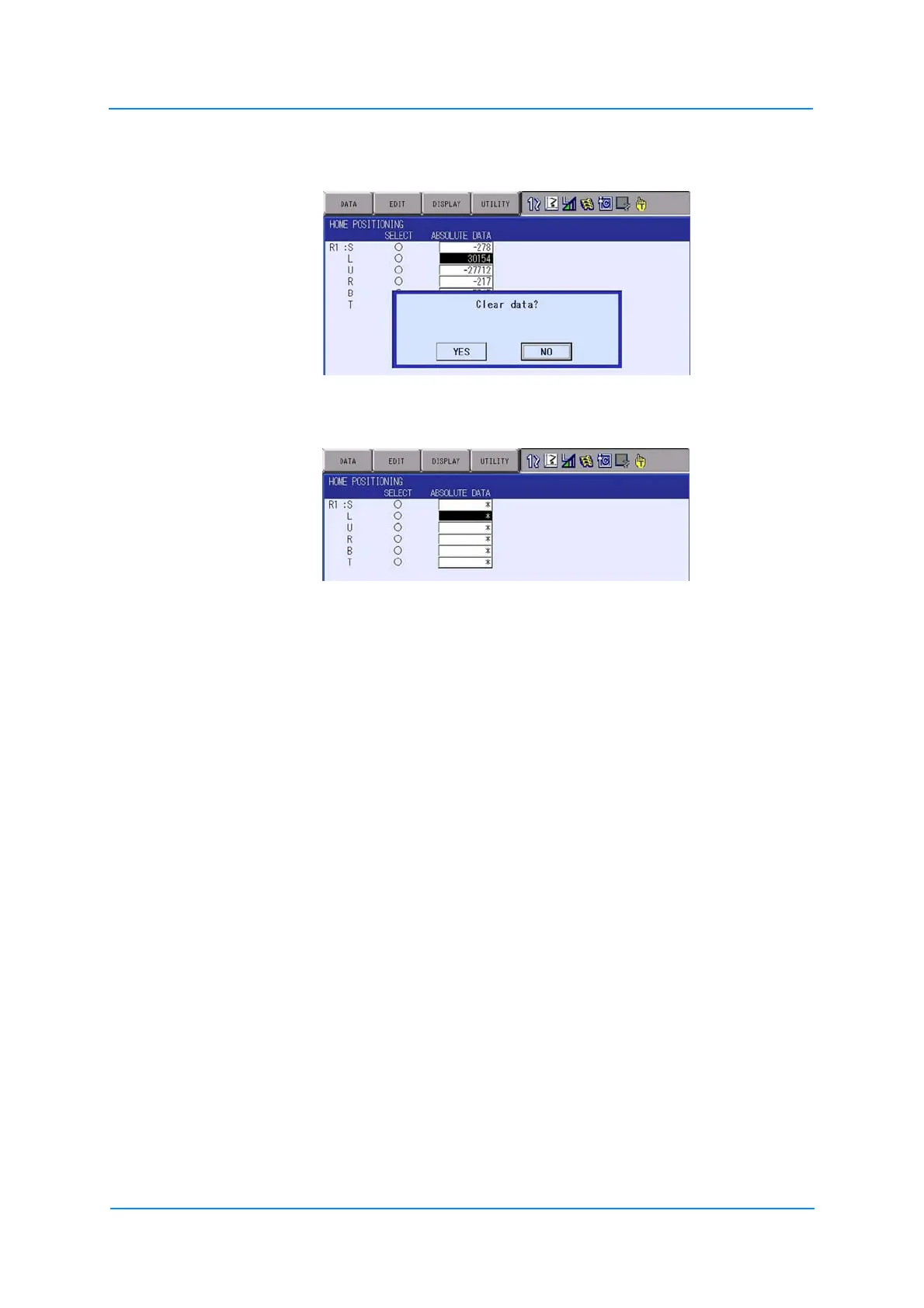
4. Select {CLEAR ALL DATA}.
A confirmation dialog box appears.
5. Select {YES}.
All absolute data will be deleted.
When {NO} is selected, the registration will be canceled.
9.5 Setting the second home position (check point)
9.5.1 Purpose of position check operation
If the absolute number of rotations determined at power supply ON does not match the data
stored in the absolute encoder the last time the power supply was turned OFF, an error
message is issued.
There are two possible causes of this alarm:
• Error in the pulse generator system
• The robot was moved after the power supply was turned OFF
If the alarm "OUTSIDE THE RANGE (ABSOLUTE DATA)" appears, automatic mode is not
possible. The home position must be checked.
 Loading...
Loading...







