2.3.6 Fitting equipment on robot
Introduction
The robot features mounting holes for additional equipment.
Access to any of the following mounting holes may be obstructed by any additional
cabling, equipment, etc., fitted by the robot user. Make sure the required mounting
holes are accessible when planning the robot cell.
Note
All equipment and cables used on the robot, must be designed and fitted not to
damage the robot and/or its parts.
Note
Never drill a hole in the robot without first consulting ABB!
Robot dimensions
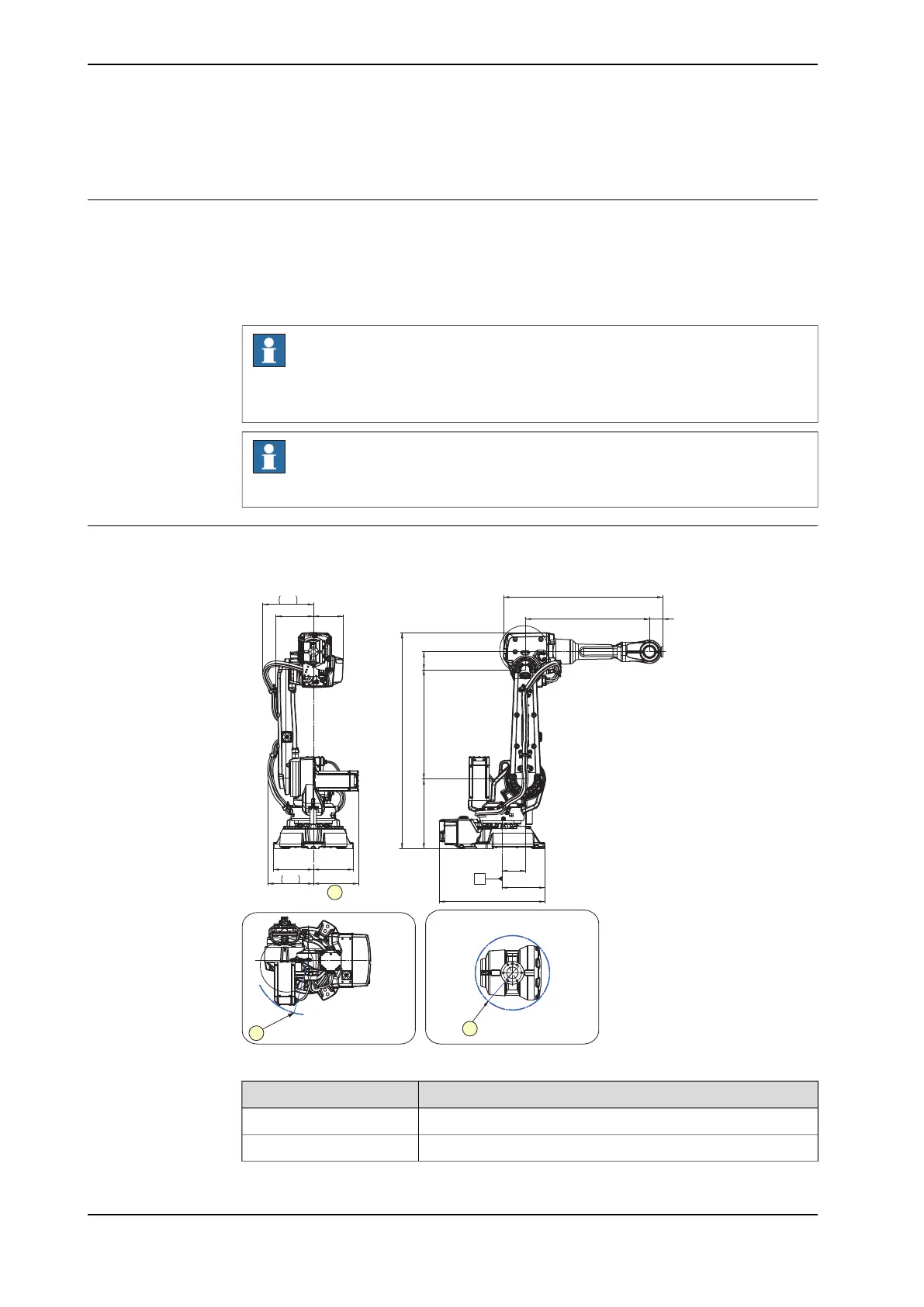
Dimensions IRB 2600-20(12)/1.65, IRB 2600 Type C-20(12)/1.65
291
B
323
190,6
255,7 255,7
C
238,4
A
Axis 1
C
L
700445
115
795
150
1382
1019
275
676
85
A
xx0900000481
DescriptionPos
R 337 Minimum turning radius of axis 1A
R 98 Minimum turning radius of axis 4B
Continues on next page
72 Product manual - IRB 2600
3HAC035504-001 Revision: AD
© Copyright 2009-2023 ABB. All rights reserved.
2 Installation and commissioning
2.3.6 Fitting equipment on robot

 Loading...
Loading...





