2.4.2 Mechanically restricting the working range of axis 1
Mechanically restricting the working range
The information in this section is valid both for the floor and the suspended mounted
robot.
The working range of axis 1 is limited by fixed mechanical stops. The working
range can be reduced further by adding movable mechanical stops.
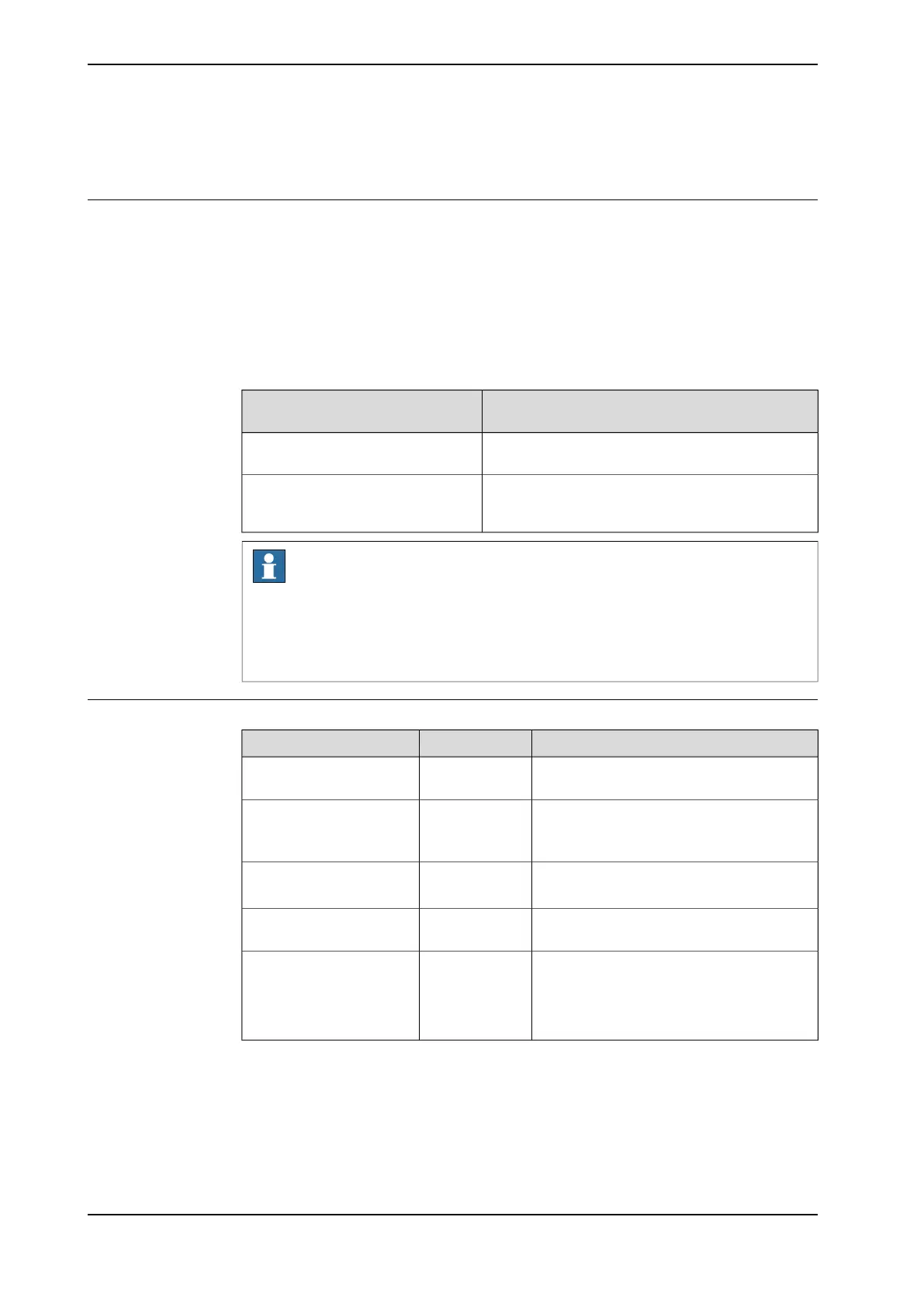
The mechanical turning range can be limited in steps of 22.5° from the
synchronization position, between values defined in the table. The values differ
depending on which design of the gearbox (and base) the robot is equipped with.
Limitation in mechanical turning range, calculated
from synchronization position
Robot variant
±126° to ±13.5° in steps of 22.5°IRB 2600-20/1.65 type C, IRB 2600-
12/1.65 type C
±129° to ±16.5° in steps of 22.5°IRB 2600-20/1.65, IRB 2600-12/1.65,
IRB 2600-12/1.85, IRB 2600ID-
15/1.85, IRB 2600ID-8/2.0
Note
The software working range limitations must be adjusted to correspond to the
changes in the mechanical limitations of the working range. The system
parameters that must be changed (Upper joint bound and Lower joint bound)
are described in Technical reference manual - System parameters.
Required equipment
NoteArt. no.Equipment, etc.
Includes two additional stop lugs, attachment
screws, washers and instruction
See Spare part
lists on page 457.
Mechanical stop, axis 1
2 pcs/stop lugSee Spare part
lists on page 457.
Attachment screw
Hex socket head cap screw M12x40, quality
8.8-A3F
2 pcs/lugSee Spare part
lists on page 457.
Washer
13x24x2.5
Content is defined in section Standard tools
on page 452.
Standard toolkit
These procedures include references to the
tools required.
Other tools and procedures
may be required. See refer-
ences to these procedures
in the step-by-step instruc-
tions below.
Continues on next page
88 Product manual - IRB 2600
3HAC035504-001 Revision: AD
© Copyright 2009-2023 ABB. All rights reserved.
2 Installation and commissioning
2.4.2 Mechanically restricting the working range of axis 1

 Loading...
Loading...





