NoteAction
Dimension is specified in Required
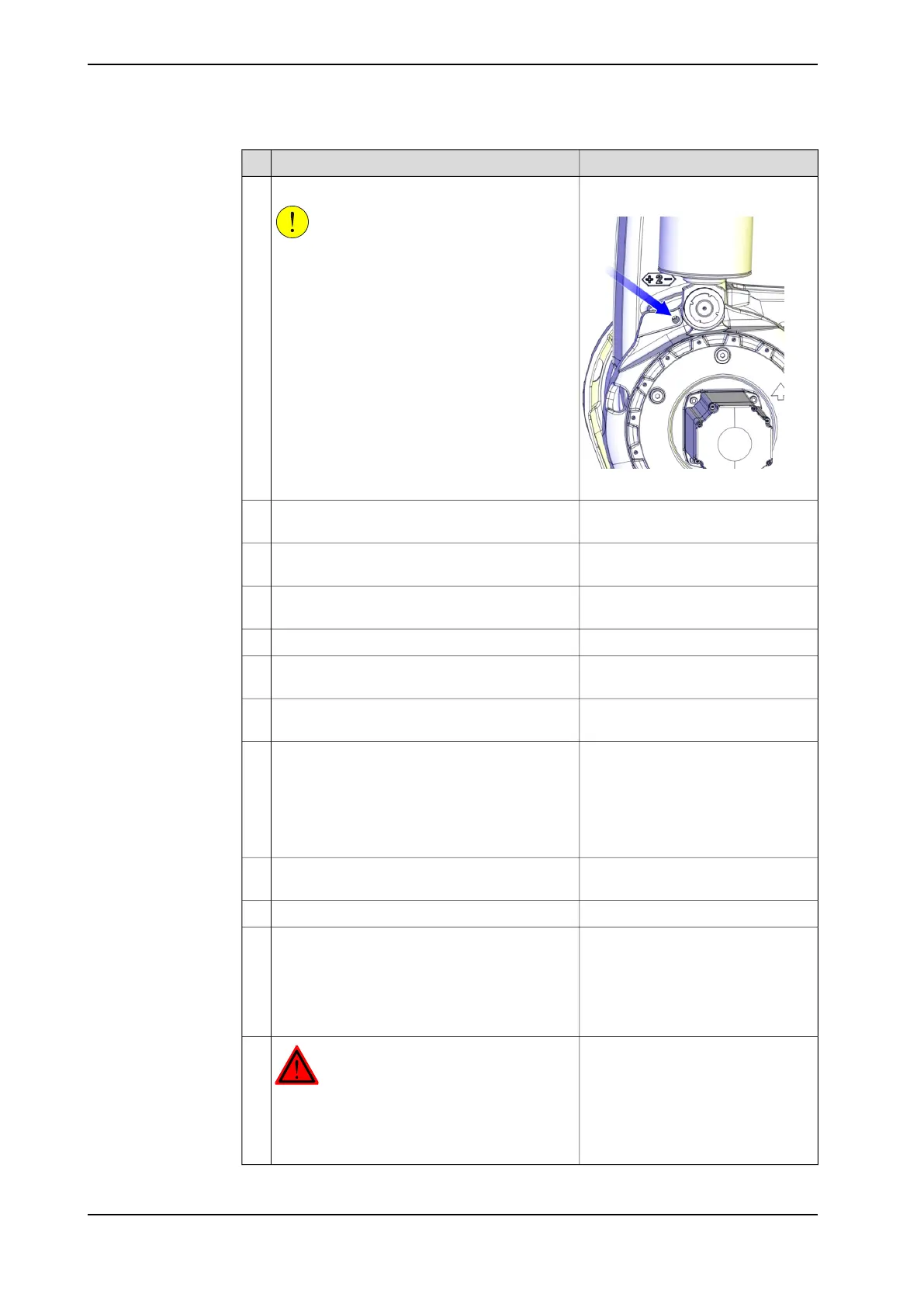
equipment on page 251.
xx1000001101
Secure the lower arm by fitting a lock screw.
CAUTION
Tighten by hand!
13
See Replacing the gearbox, axes 2-
3 on page 311.
Refit the axes 2 and 3 gearboxes.14
See Replacing motors, axes 2 and 3
on page 284.
Refit the axes 2 and 3 motors.15
See Replacing the upper arm on
page 209.
Refit the complete upper arm.16
SeeRefit the cable harness.17
See Replacing the parallel rod on
page 244
Refit the parallel rod.18
See Replacing the balancing device
on page 265.
Refit the balancing device.19
See Replacing linkage - upper link
arm on page 221
Refit the linkage.20
See Replacing the linkage - lower link
arm on page 228
See Replacement of linkage - link on
page 235
See Replacing the balancing weight
on page 274.
Refit the balancing weight.21
Remove the lock screw.22
Calibration is detailed in a separate
calibration manual enclosed with the
calibration tools.
Recalibrate the robot.23
General calibration information is in-
cluded in section Calibration informa-
tion on page 329.
DANGER
Make sure all safety requirements are met when
performing the first test run. These are further
detailed in the section DANGER - First test run
may cause injury or damage! on page 45.
24
258 3HAC039838-001 Revision: C
© Copyright 2013 ABB. All rights reserved.
4 Repair
4.4.8 Replacing the complete lower arm
Continued

 Loading...
Loading...






