2.5 Robot in cold environments
2.5.1 Start of robot in cold environments
Introduction
This procedure describes how to start the robot in a cold environment.
Starting in cold environment
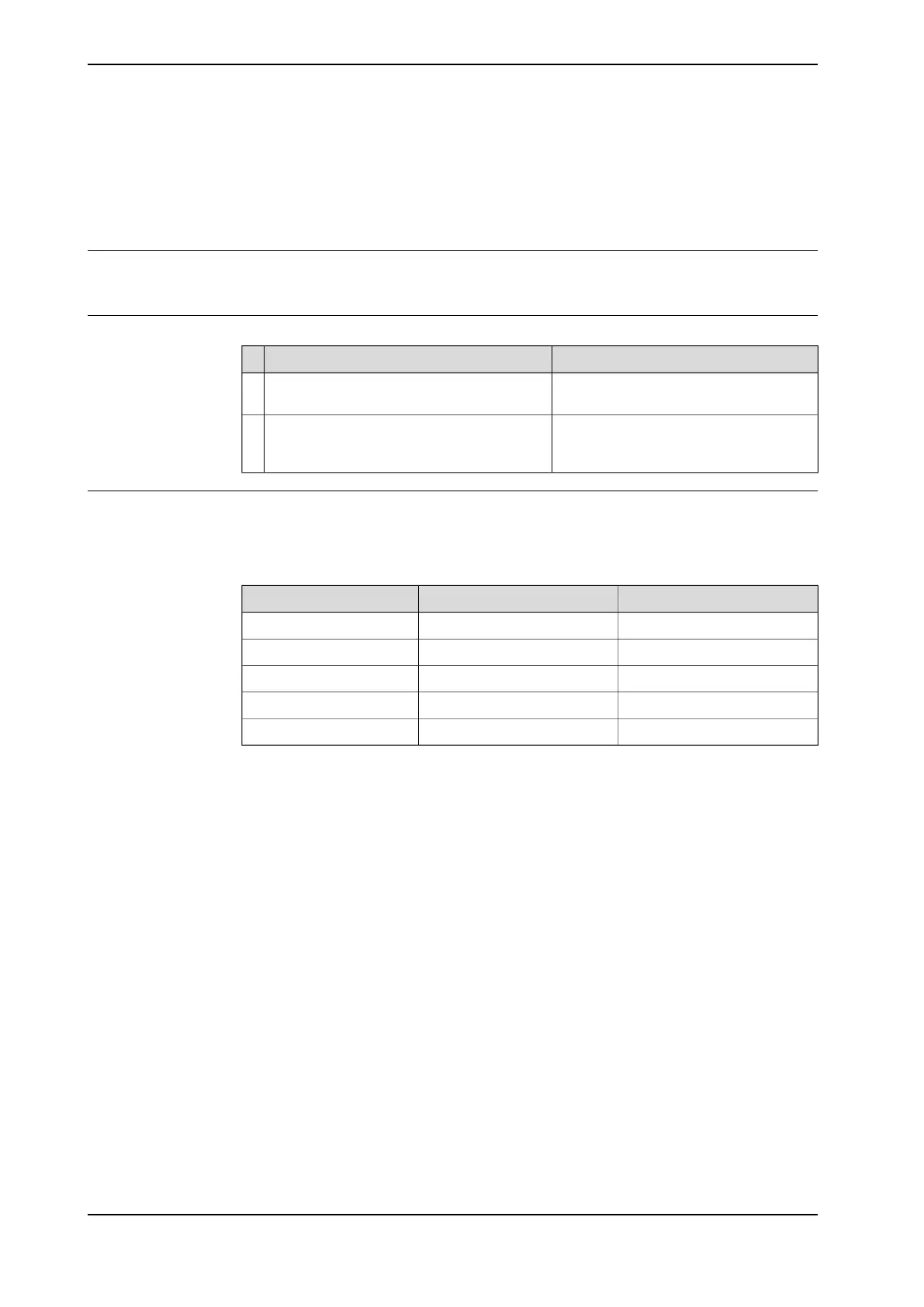
NoteAction
Start the robot the normal way. Proceed to
next step, if the robot does not start.
1
Velocity can be regulated with the RAPID
code instructions and the instruction
AccSet.
Start the robot with its normal program but
with lowered velocity (<25%). Increase velo-
city to 100% after a couple of minutes.
2
Adjusting velocity
Depending on how cold the environment is and the program being used, the
ramping up of velocity has to be adjusted. The table shows examples of how to
adjust velocity:
VelocityAccSetWorkcycles
10020.203 Work cycles
40040.405 Work cycles
60060.605 Work cycles
1000100.1005 Work cycles
Max.100.100More than 5 Work cycles
If the program consists of large wrist movements, it is possible that the reorientation
velocity, which is always high in predefined velocities, needs to be included in the
ramping up.
96 3HAC039838-001 Revision: C
© Copyright 2013 ABB. All rights reserved.
2 Installation and commissioning
2.5.1 Start of robot in cold environments
 Loading...
Loading...







