—
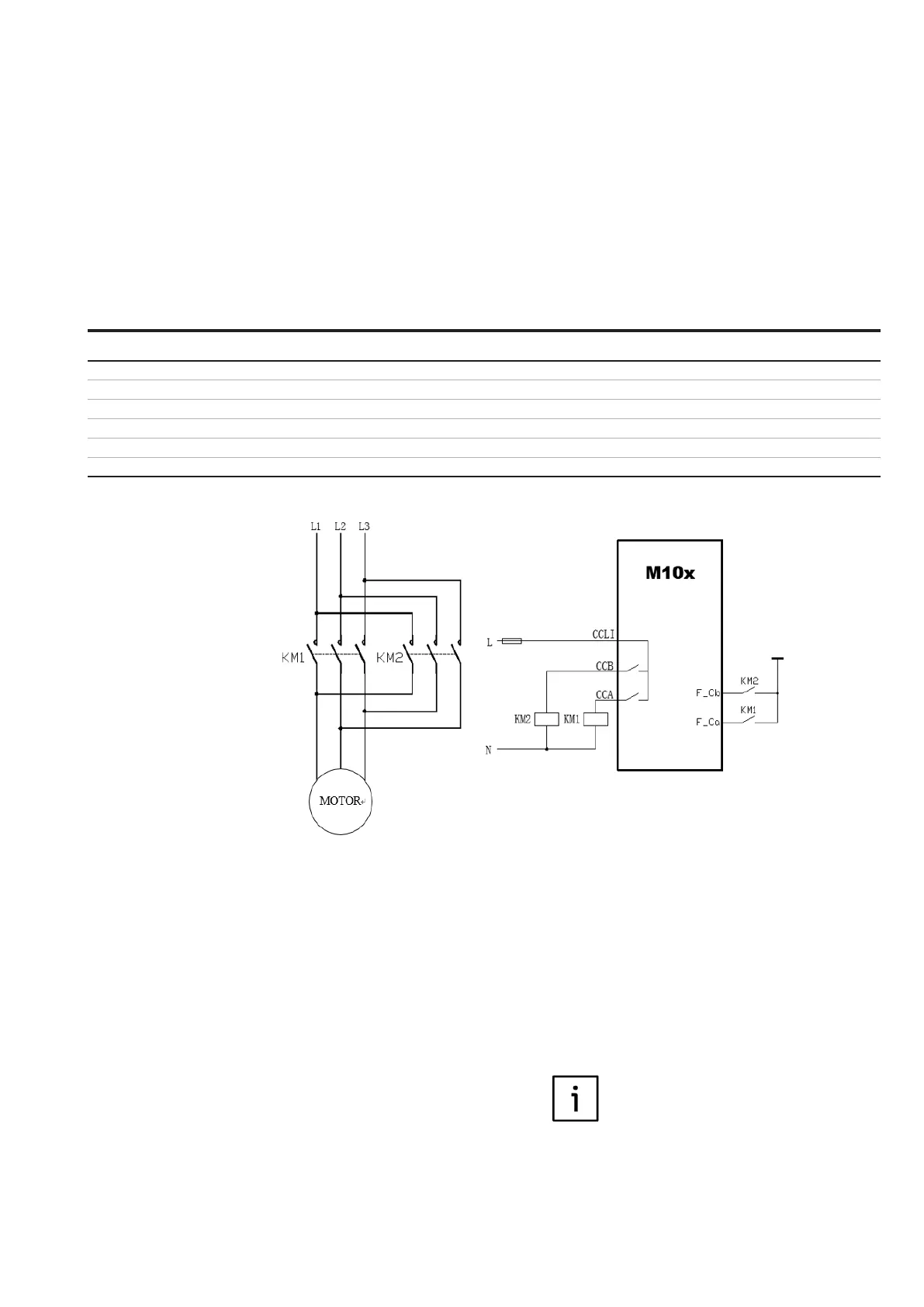
18 Control circuit for REV-DOL starter (for M10x)
REV-DOL STARTER
REV-DOL uses contactor control output A to
control the contactor that drives the motor in
direction CW. Correspondingly, contactor control
output B is used for direction CCW. When the
starting motor to either direction contactor will
be energized and is stopped (not energized) by
command from fieldbus or local I/O, or active
protection function.
Name Pin Description
CCLI X4:6 Contactor control voltage input
CCA X4:7 Contactor control A
CCB X4:8 Contactor control B
DI6(F_Ca) X1:7 Contactor control A feedback
DI7(F_Cb) X1:8 Contactor control B feedback
DI5(Loc/R) X1:6 Local/remote control switch input
—
* The assigned DI and PIN code may change in actual design
Operating sequence under REV-DOL
• Running forward Sequence: Motor is stopped
and ready to run forward → Forward command
(Start 1) received → Internal CCA contact closed
and remain closed → Feedback received
• Reversing Sequence: Motor is stopped and
ready to reverse → Reverse command (Start 2)
received → Internal CCB contact close and
remain closed → Feedback received
• Stopping Sequence: Motor is running → STOP
command received → Internal CCA & CCB
contact open → Feedback received
Contactor feedback is used for acknowledge the
running direction hence can not be disabled
through parameter in a REV-DOL starter. Current
feedback is always on the background to ensure
the completion of an expected operation
sequence. The feedback time is adjustable.
Take note of the CT location for the
application. CT location should be on
the line side of both K1 and K2 to
ensure correct current phase sequence
reading.
26 MOTOR CONTROL AND PROTECTION UNIT M10X USER GUIDE

 Loading...
Loading...









