Process Control Instructions
Rockwell Automation Publication 1756-RM006K-EN-P - November 2018 203
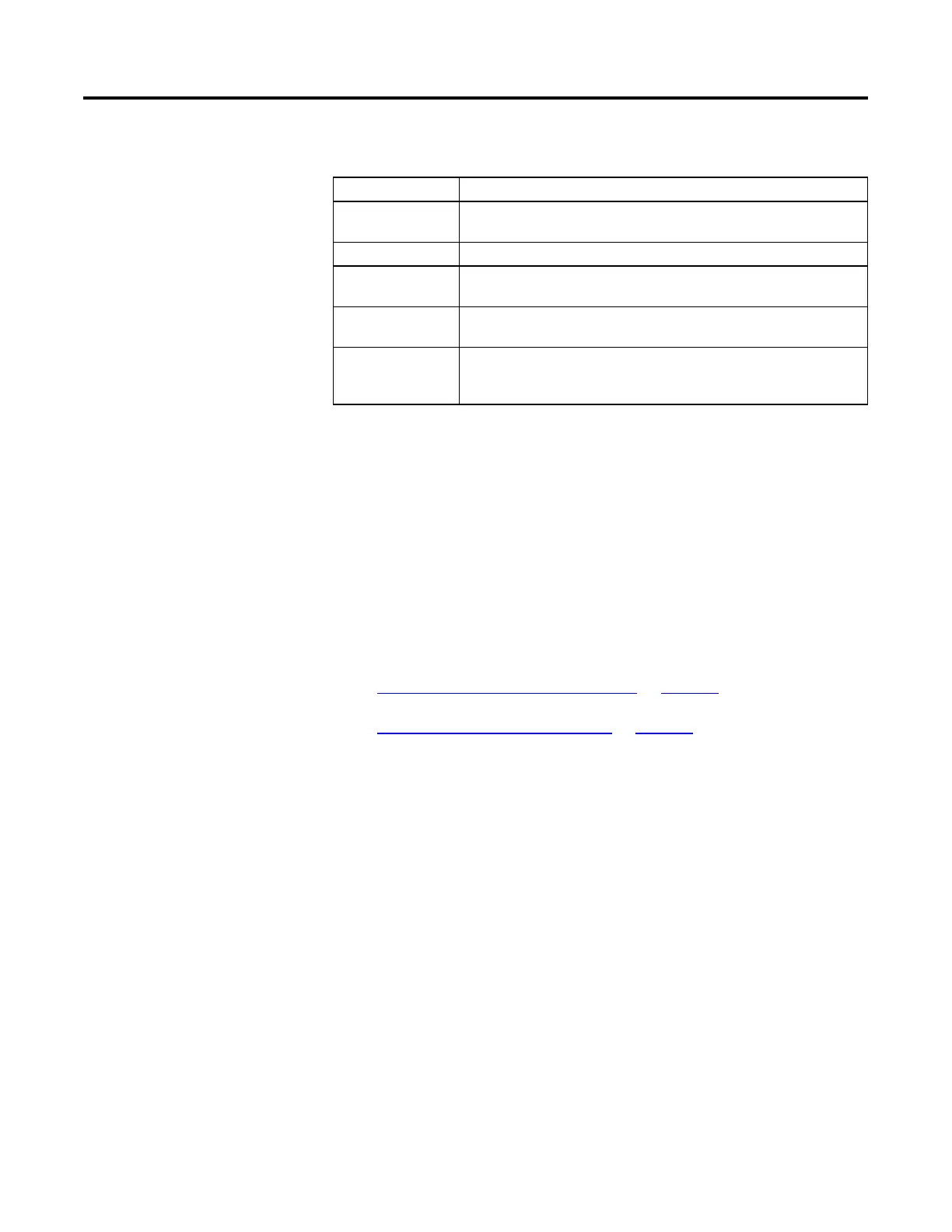
Set the tuner by configuring the following parameters.
ProcessType Integral (level, position control) or nonintegrating (flow, pressure control)
ProcessGainSign Set to indicate a negative process gain (increase in output causes a decrease in PV); reset to
indicate a positive process gain (increase in output causes an increase in PV).
ResponseSpeed Slow, medium, or fast, based on control variable.
NoiseLevel An estimate of noise level on PV-low, medium, or high such that the tuner can distinguish
which PV change is a random noise and which is caused by the CV step change.
StepSize A nonzero positive or negative number defining the magnitude of CV step change in either
positive or negative direction, respectively.
PVTuneLimit (Only for integrating process type) in PV engineering units, defines how much of PV change
that is caused by CV change to tolerate before aborting the tuning test due to exceeding this
limit.
The tuner is started by setting the AtuneStart bit. You can stop the tuning by
setting the AtuneAbort bit. After the tuning is completed successfully, the
GainTuned, TCTuned, DTTuned, and RespTCTuned parameters are updated
with the tuning results, and the AtuneStatus code is set to indicate complete.
You can copy these parameters to the ModelGain, ModelTC, and ResponseTC,
respectively, by setting the AtuneUseModel bit. The function block will
automatically initialize the internal variables and continue normal operation. It
will automatically reset the AtuneUseModel bit.
See also
IMC Function Block Tuning Procedure on page 204
IMC Function Block Tuning Errors on page 203
If an error occurs during the tuning procedure, the tuning is aborted, and the
AtuneStatus bit is set. You can abort the tuning by setting the AtuneAbort bit.
After an abort, the CV will assume its value before the step change, and the
GainTuned, TCTuned, DTTuned, and RespTCTuned parameters are not
updated. The AtuneStatus parameter identifies the reason for the abort.
IMC Function Block Tuning
Errors