312 Rockwell Automation Publication 1756-RM006K-EN-P - November 2018
feed forward path in the regulator to compensate for processes that have a high
degree of inertia.
Structu
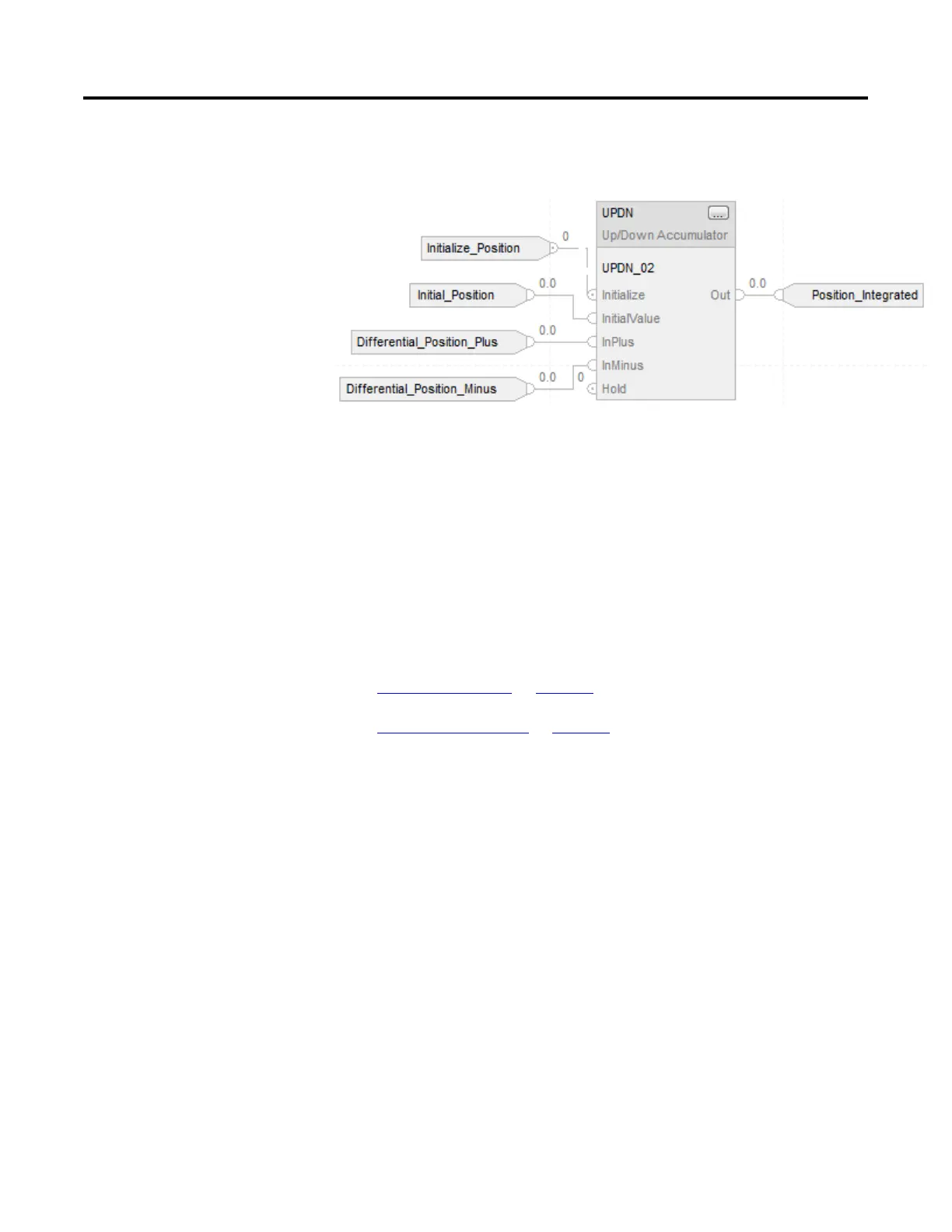
red Text
UPDN_01.Initialize := Initialize_Position;
UPDN_01.InitialValue := Initial_Position;
UPDN_01.InPlus := Differential_Position_Plus;
UPDN_01.InMinus := Differential_Position_Minus;
UPDN(UPDN_01);
Position_Integrated := UPDN_01.Out;
See also
Common Attributes on page 537
Structured Text Syntax on page 508
This information applies to the CompactLogix 5370, ControlLogix 5570,
Compact GuardLogix 5370, GuardLogix 5570, Compact GuardLogix 5380,
CompactLogix 5380, CompactLogix 5480, ControlLogix 5580, and GuardLogix
5580 controllers.
Use the HMI Button Control (HMIBC) instruction with a PanelView 5500
Human Machine Interface (HMI) to enable operators to initiate machine control
operations, such as jogging a motor or enabling a valve, with a high degree of
accuracy and determinism. The HMIBC instruction also provides built-in
communications diagnostics that permit the instruction to automatically reset if
the communications from the controlling HMI become unavailable.
Each Logix controller supports up to 256 HMIBC tags and up to 32 PanelView
5500 HMI's to simultaneously communicate and control the instruction.The
HMIBC instruction goes active and enables its output when a PanelView 5500
HMI device initiates a button control operation associated with the instance tag of
the instruction.
HMI Button Control (HMIBC)
 Loading...
Loading...



