Rockwell Automation Publication 1756-RM006K-EN-P - November 2018 311
Example
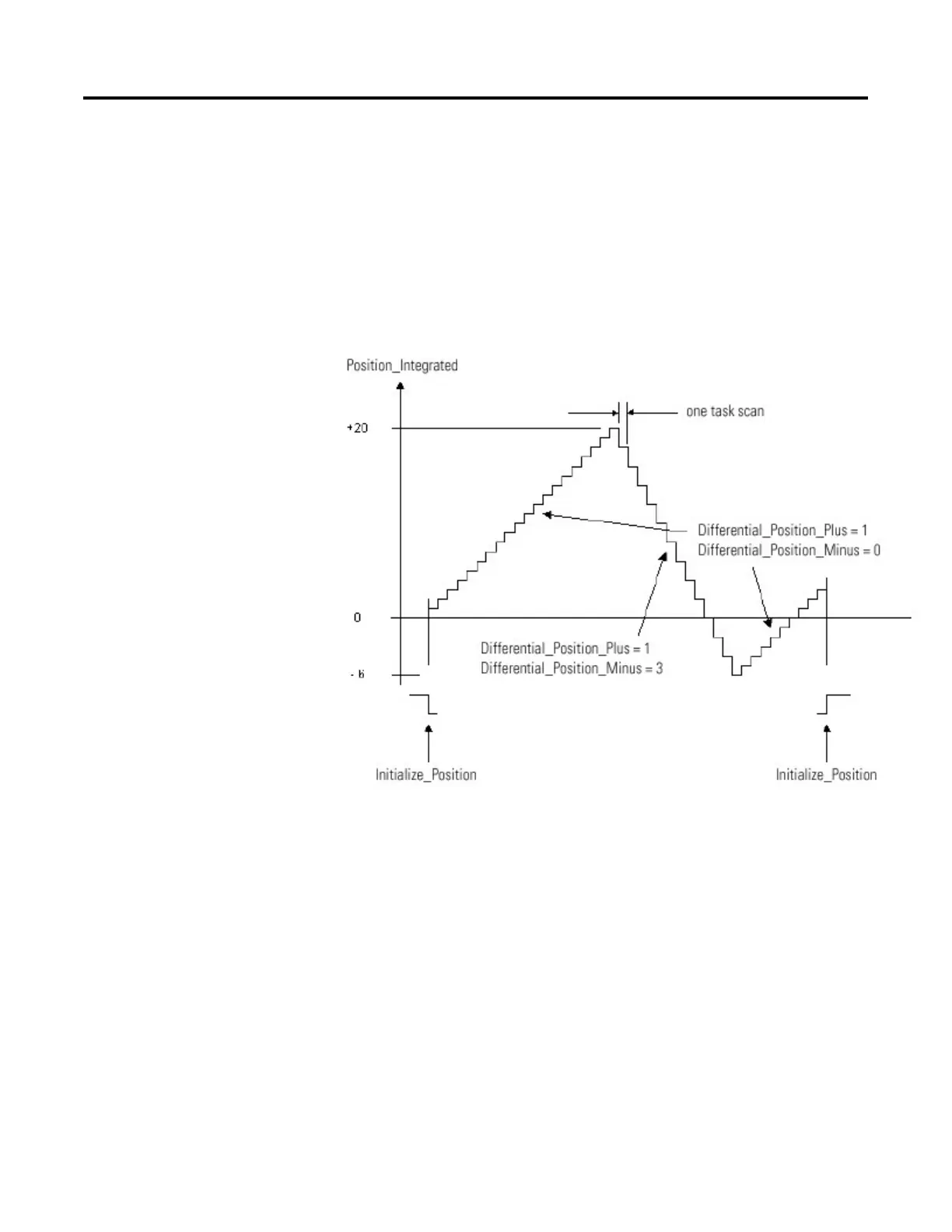
The UPDN instruction integrates counts from one scan to the next. This
instruction can be used for simple positioning applications or for other types of
applications where simple integration is required to create an accumulated value
from a process’s differentiated feedback signal. In the example below,
Initial_Position is set to zero, while Differential_Position_Plus and
Differential_Position_Minus take varying values over a period of time. With this
instruction, InPlus and InMinus could also accept negative values.
Function Block
The derivative instruction calculates the amount of change of a signal over time in
per-second units. This instruction is often used in closed loop control to create a
 Loading...
Loading...



