%
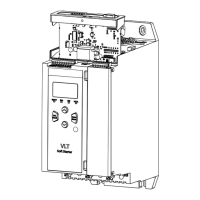
Voltage (% full voltage)
Time
Illustration 34: Example of TVR
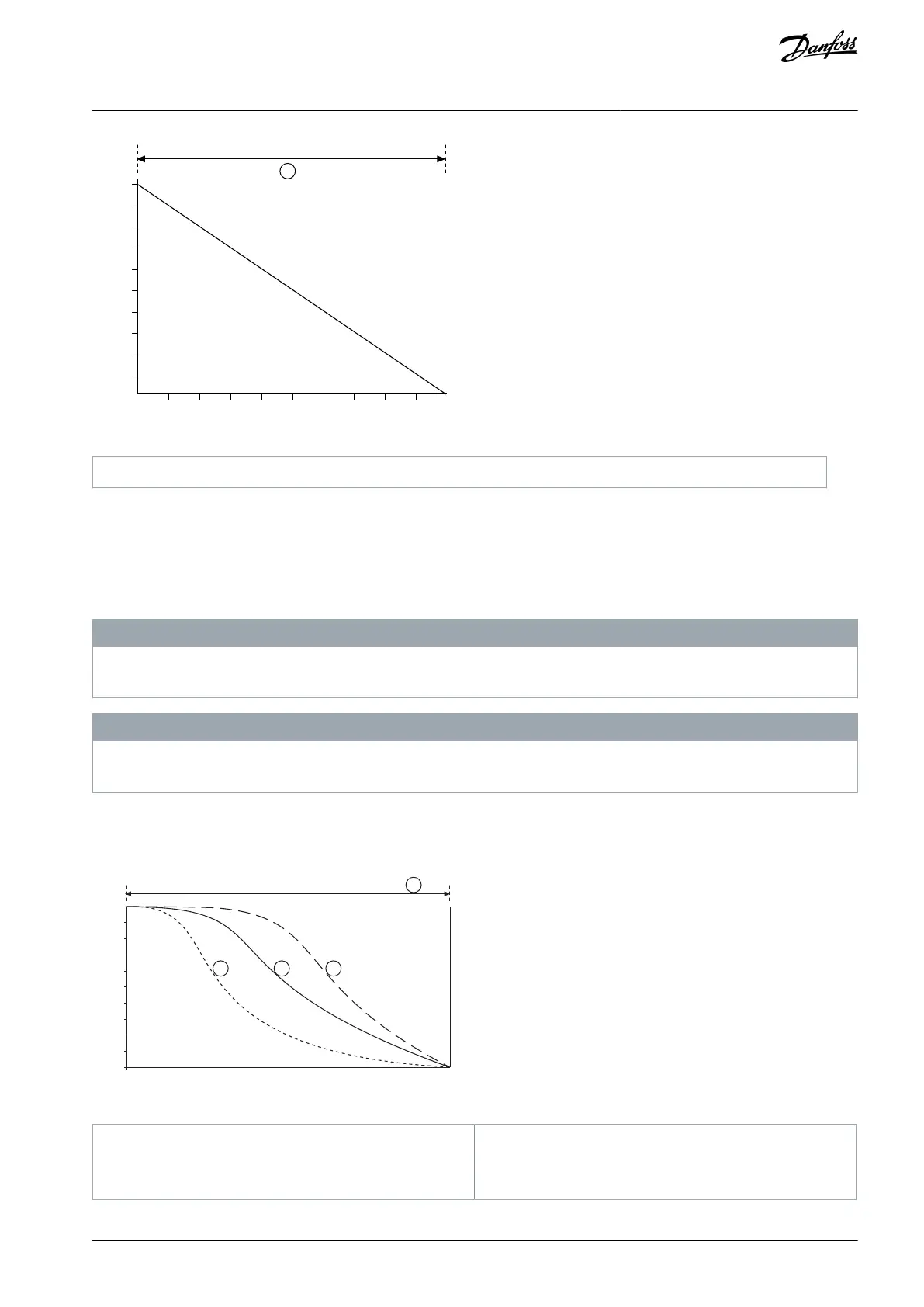
9.9.3 Adaptive Control for Stopping
In an adaptive control soft stop, the soft starter controls the current to stop the motor within a specified time and uses a selected
deceleration profile. Adaptive control can be useful in extending the stopping time of low inertia loads.
If adaptive control is selected, the first soft stop uses TVR. This allows the soft starter to learn the characteristics of the connected
motor. This motor data is used by the soft starter during subsequent adaptive control stops.
N O T I C E
Adaptive control does not actively slow the motor down and does not stop the motor faster than a coast to stop. To shorten the
stopping time of high inertia loads, use brake.
N O T I C E
Adaptive control controls the motor's speed profile within the programmed time limit. This may result in a higher level of current
than traditional control methods.
If replacing a motor connected to a soft starter programmed for adaptive control starting or stopping, the soft starter has to learn
the characteristics of the new motor. Change the value of parameter 1-2 Motor Full Load Current or parameter 2-12 Adaptive Control
Gain to initiate the relearning process. The next start will use constant current and the next stop will use TVR.
Illustration 35: Example of Adaptive Control Stop (Parameter 2-11 Adaptive Stop Profile)
AQ262141844215en-000401 / 175R1174 | 67Danfoss A/S © 2020.12
Operation
VLT® Soft Starter MCD 600
Operating Guide

 Loading...
Loading...