G-28
6 Troubleshooting
FX
3U
/FX
3UC
Series PLC User's Manual - Analog Control Edition
PID Instruction (FNC 88)
6.1 Error Codes
6. Troubleshooting
6.1 Error Codes
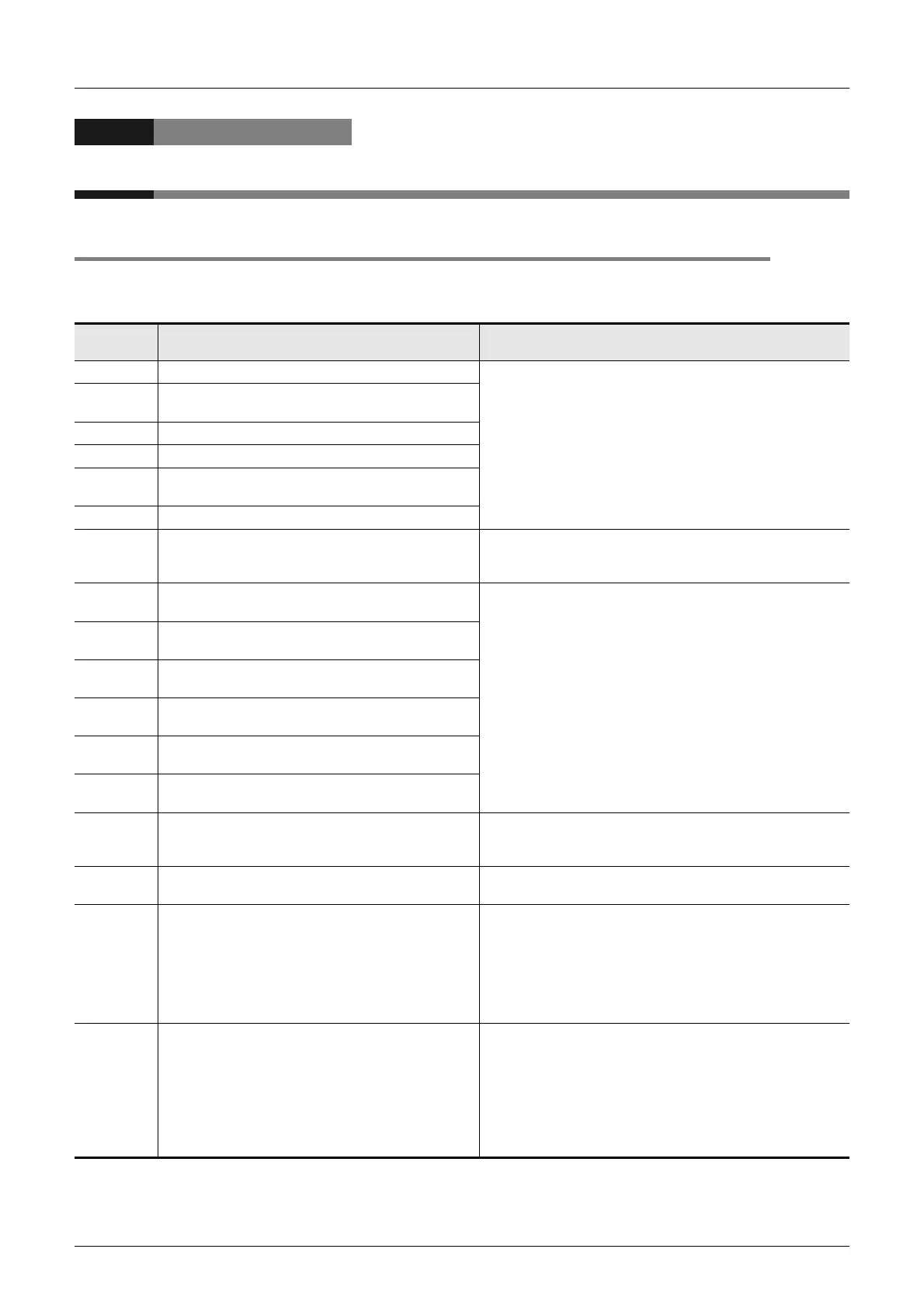
When an error occurs in the set value of a control parameter or the data acquired during the PID operation,
the operation error flag M8067 turns ON, and a corresponding error code is stored in D8067.
Error
code
Error description Action
6730 Incorrect sampling time (TS) (TS ≤ 0)
<PID operation is stopped.>
A data error has occurred in the set value in a control parameter
or in the middle of PID operation.
Check the parameters.
6732
Incorrect input filter constant (α)
(α < 0 or 100 ≤ α)
6733
Incorrect proportional gain (KP) (KP < 0)
6734
Incorrect integral time (TI) (TI < 0)
6735
Incorrect derivative gain (KD)
(K
D < 0 or 201 ≤ KD)
6736 Incorrect derivative time (TD) (TD < 0)
6740 Sampling time (TS) ≤ Operation cycle
<Auto tuning is continued.>
The operation is continued in the condition "sampling time (TS)
= cyclic time (operation cycle)."
6742
Variation of measured value exceeds limit.
(UPV < −32768 or +32767 < UPV)
<PID operation is continued.>
The operation is continued with each parameter set to the
maximum or minimum value.
6743
Deviation exceeds limit.
(EV < −32768 or +32767 < EV)
6744
Integral result exceeds limit.
(Out of range from −32768 to +32767)
6745
Derivative value exceeds limit due to derivative gain
(K
D).
6746
Derivative result exceeds limit.
(Out of range from −32768 to +32767)
6747
PID operation result exceeds limit.
(Out of range from −32768 to +32767)
6748
PID output upper limit set value < PID output lower limit
set value
<Output upper limit value and output lower limit value are
exchanged for each other. → PID operation is continued.>
Check whether the target settings are correct.
6749
Abnormal PID input variation alarm set value or output
variation alarm set value (Set value < 0)
<Alarm output is not given. → PID operation is continued.>
Check whether the target settings are correct.
6750
<Step response method>
Improper auto tuning result
<Auto tuning is finished. → PID operation is started.>
• When auto tuning was started, the difference between the
measured value and the target value was 150 or less.
• When auto tuning was started, the difference between the
measured value and the target value was 1/3 or more.
Check the measured value and target value, and then execute
auto tuning again.
6751
<Step response method>
Auto tuning operation direction mismatch
<Auto tuning is forcibly finished. → PID operation is not
started.>
The operation direction estimated from the measured value at
the start of auto tuning was different from the actual operation
direction of the output during auto tuning.
Correct the relationship among the target value, output value
for auto tuning and measured value, and then execute auto
tuning again.

 Loading...
Loading...




