74 LD-250 Platform User's Guide 20472-000 Rev B
4.3 Acceleration, Deceleration, and Rotation Limits
4.3 Acceleration, Deceleration, and Rotation Limits
For safety, an AMR has default limits on its maximum linear and rotational acceleration, decel-
eration, and speed. You can change the parameters that control these limits. However, chan-
ging the limits might affect the AMR's stability, depending on the center of gravity (CG) of the
combined LD-250 and its payload.
CAUTION: PROPERTYDAMAGE RISK
If you change the value of the AbsoluteMaxTransVel parameter, re-commission
the AMR before putting it into service.
If your payload’s center of gravity is not within the guidelines provided in Center of Gravity
(CG) on page 86, you might need to adjust the Absolute Movement Maximums parameter val-
ues in the MobilePlanner software.
For payload applications where you cannot easily reduce the size and weight of the payload or
if the AMR’s CG is not within the recommended limits, contact your local Omron Support.
Table 4-1 lists the Absolute Movement Maximums parameter limits and defaults. The first
four parameters have the least significant impact on the AMR‘s stability. All *Accel and *Decel
parameters have a significant impact. If the payload is asymmetric, you might need to adjust
the value of AbsoluteMaxRotVel.
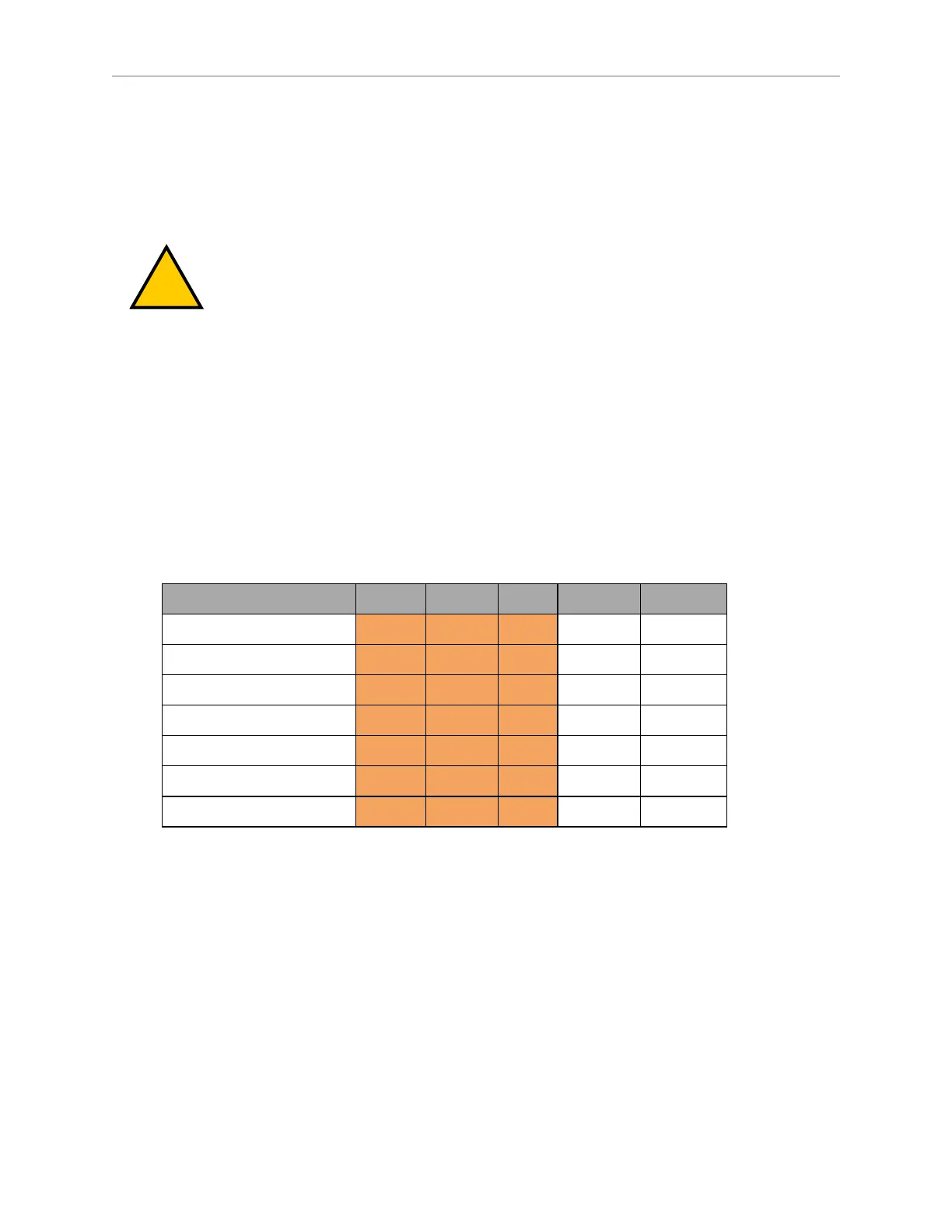
Table 4-1 Absolute Movement Maximums Parameters
Parameter Default Min Max Your Min Your Max
AbsoluteMaxTransVel 1200 1 32767
AbsoluteMaxTransNegVel -200 -32767
a
32767
AbsoluteMaxTransAccel 600 1 32767
AbsoluteMaxTransDecel 2000 1000 32767
AbsoluteMaxRotVel 120 1 32767
AbsoluteMaxRotAccel 360 1 32767
AbsoluteMaxRotDecel 360 -32767
a
32767
a: The LD-250's safety system generates a fault if the velocity is in the range -300 mm/s to -2500
mm/s.
After you determine your parameter values, set them as follows:
1.
Open the MobilePlanner software, Config tab.
2.
Navigate to:
Robot Physical >Absolute Movement Maximums
3.
Check the box for Show Expert + Parameters (top right of screen) to see or modify these
parameters.
4.
Adjust the parameter values according to Table 4-1.