4-9
Narrow Passageway Behavior (Non-
linear)
This section provides information about AMR behavior and other considerations when it travels
through narrow passageways and doorways during non-linear motions.
For all the cases presented in this section, the passageway widths are practical for average AMR
speeds of 300 to 500 mm/s.
These limitations are different from those described for minimum lane width behavior because the
AMR needs more clearance when detecting another moving object versus fixed objects. Refer to
4-10 Minimum Lane Width on page 4-18 for more information.
4-9-1
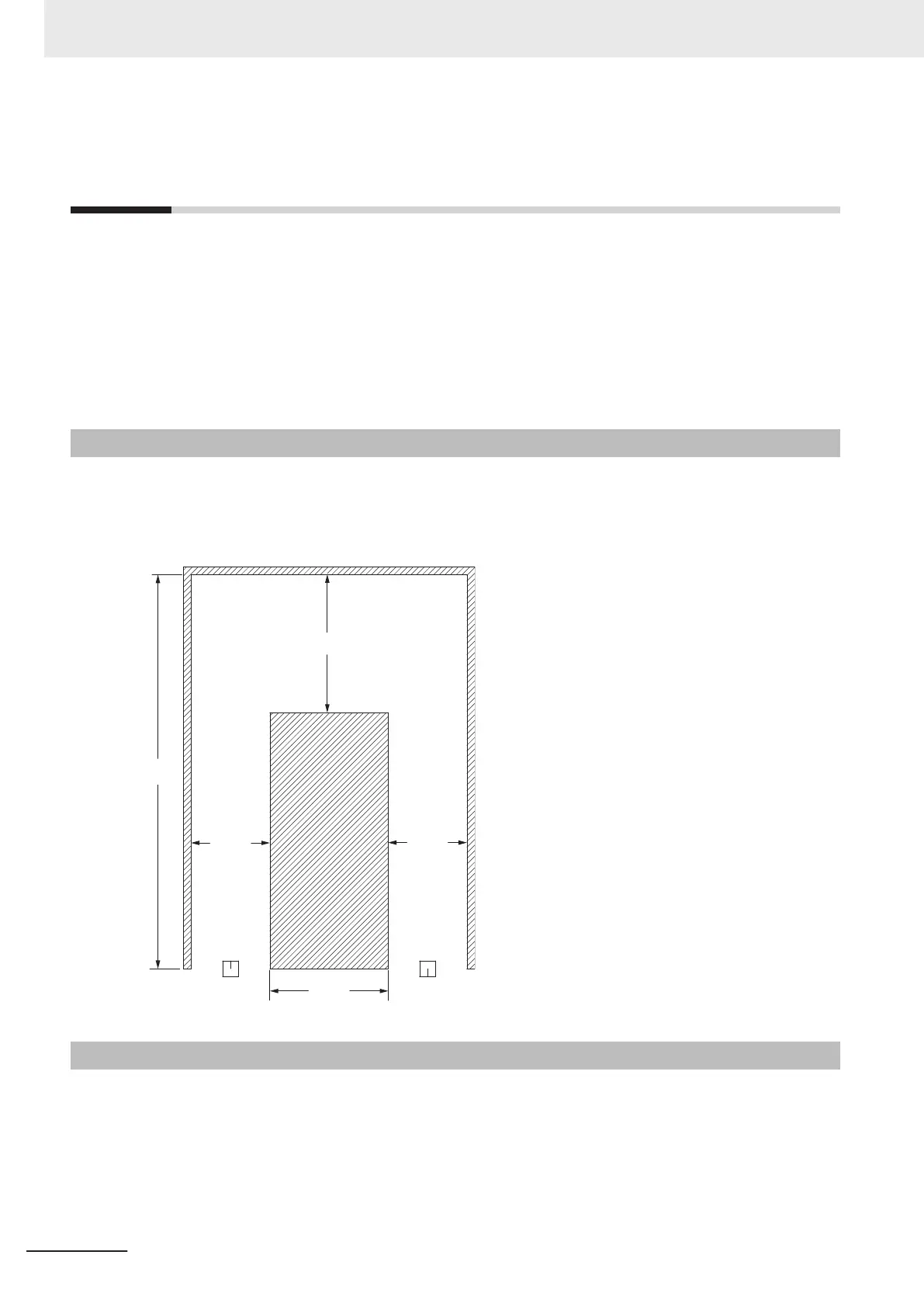
U-Turn in a Narrow Passageway
The following figure displays a situation where an AMR must make a U-Turn in a narrow passageway
with a 2000 mm width and with the U-Turn clearance of 3500 mm.
Make AMR tasks and configuration changes to optimize operation during U-Turns in narrow passage-
ways.
Start Goal
End Goal
U-Turn
Clearance
3500
2000
10000
3000
2000
4-9-2
U-Turn Through a Narrow Doorway
The following figure displays the AMR U-Turn behavior at a narrow doorway.
As displayed in the following figure, the distance between the edge of the door opening and the adja-
cent wall is 250 mm.
Make AMR tasks and configuration changes to optimize operation of the AMR in narrow doorways.
4 Operation
4-16
AMR (Autonomous Mobile Robot) MD-series Platform User's Manual (I681)
 Loading...
Loading...









