4-27
Motion Limits
An AMR has default limits on its maximum linear and rotational acceleration, deceleration, and speed
for safety purposes. Changing these limits might affect the AMR's stability, depending on the center of
gravity of the combined AMR and its payload.
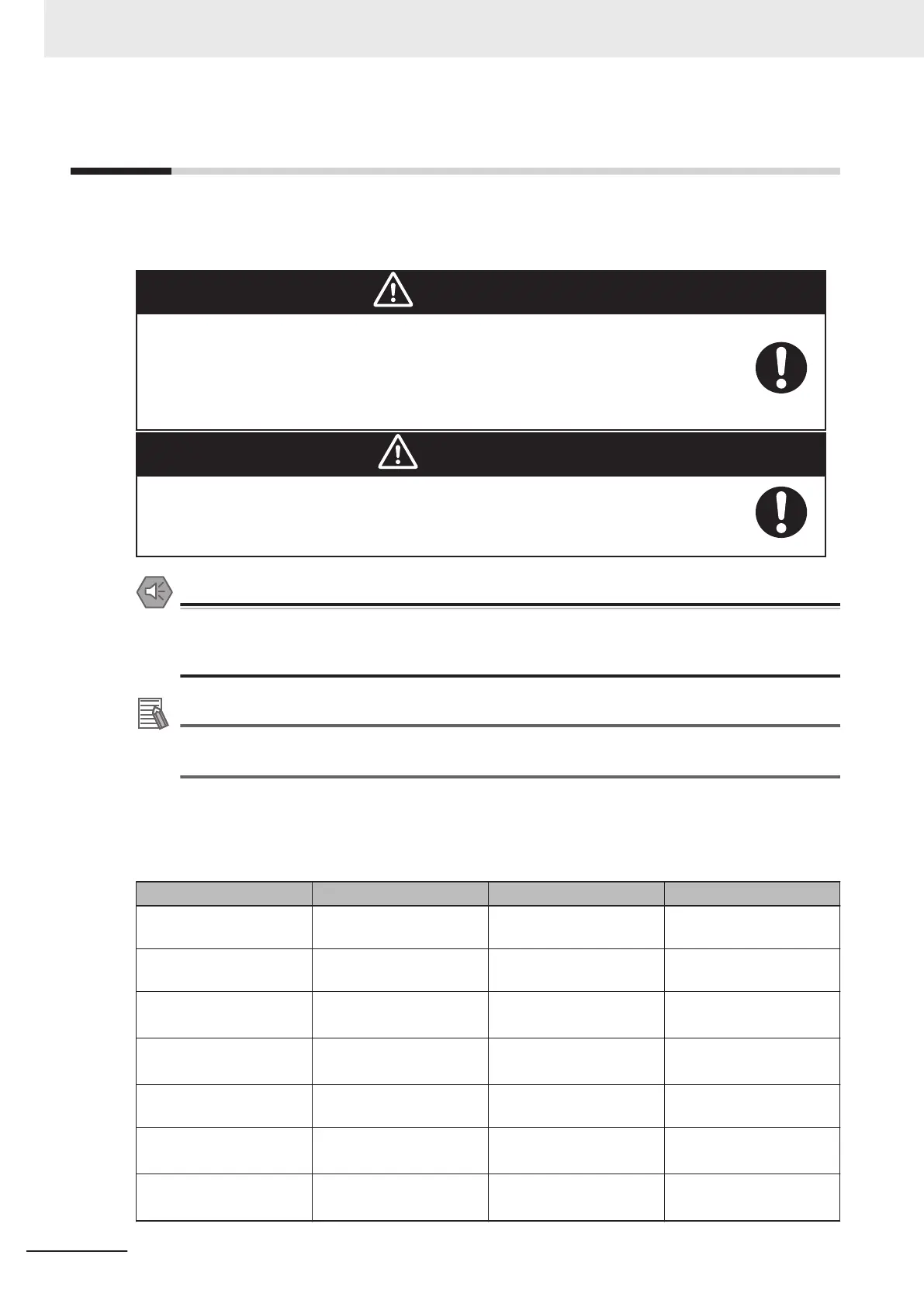
WARNING
While it is possible to generally reduce AMR deceleration settings for normal opera-
tion, the maximum deceleration used in the case of emergency stops, or stops due to
Safety Laser Scanner intrusions cannot be lowered below 1300 mm/s
2
. It is your re-
sponsibility to ensure that the AMR and its load will remain stable in your operating
environment at all times, including during an emergency stop.
CAUTION
If you change AbsoluteMaxTransVel parameter, you should commission the AMR be-
fore putting it into service.
Precautions for Safe Use
For payload applications where you cannot easily reduce the size and weight of the payload, or
if the AMR’s center of gravity is not within the recommended limits, contact your local OMRON
representative for support.
Additional Information
Use the configuration area in MobilePlanner to make parameter changes. Refer to Fleet
Operations Workspace Core User's Manual (Cat. No. I635) for more information.
The Absolute Movement Maximums parameter limits and defaults are provided below. All acceleration
and deceleration parameters have a significant impact. If the payload is asymmetric, you might need
to adjust the value of AbsoluteMaxRotVel parameter.
Parameter Default Minimum Maximum
AbsoluteMaxTransVel
(mm/s)
2200 for MD-650
1800 for MD-900
1 2200 for MD-650
1800 for MD-900
AbsoluteMaxTransNegVel
(mm/s)
-2200 for MD-650
-1800 for MD-900
-2200 for MD-650
-1800 for MD-900
-1
AbsoluteMaxTransAccel
(mm/s
2
)
900 1 1500
AbsoluteMaxTransDecel
(mm/s
2
)
1300 1300 2000
AbsoluteMaxRotVel
(deg/s)
60 1 60
AbsoluteMaxRotAccel
(deg/s
2
)
150 1 200
AbsoluteMaxRotDecel
(deg/s
2
)
150 150 200
4 Operation
4-76
AMR (Autonomous Mobile Robot) MD-series Platform User's Manual (I681)
 Loading...
Loading...









