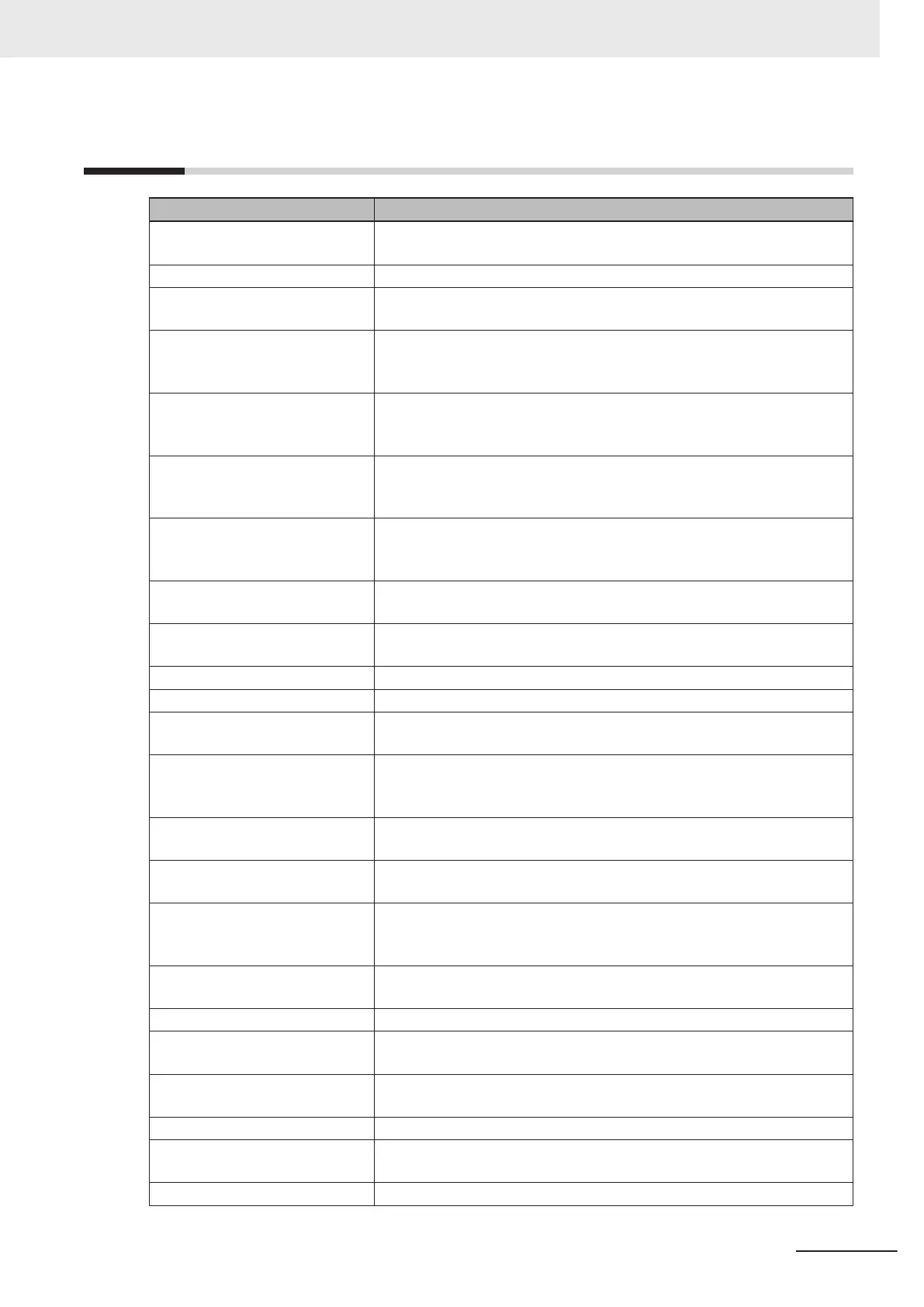
Glossary
Term / Abbreviation Description
Ambient Operating Temperature The temperature range of the AMR's environment in which continued oper-
ation is possible.
AMR This term is used to refer to the MD-series autonomous mobile robot.
AMR Controller The AMR's main computing system that provides all navigational controls
and application interfaces.
ARAM Advanced Robotics Automation Management software that performs all of
the high-level, autonomous robotics functions, including obstacle avoid-
ance, path planning, localization, and navigation.
ARAMCentral The software running on the Fleet Manager appliance. This manages the
AMRs' map, configuration, and traffic control including multi-AMR avoid-
ance, destination, standby, and docking.
ARCL Advanced Robotics Command Language that provides a simple, text-
based, command-and-response operating language. Used with the option-
al EM2100 appliance, ARCL can help manage a fleet of mobile robots.
Auto-MDIX A connection port feature that automatically detects the Ethernet cable type
being used (straight-through or crossover) and configures the connection
appropriately.
Beacon An optional indicator lamp mounted on the AMR to provide additional visual
indication and signaling of the operating state.
CAN bus Controller Area Network that provides a serial communications protocol al-
lowing electronic control units and devices to communicate with each other.
CAT5 Twisted pair Ethernet cable that supports 100 Mhz frequency.
Center of Gravity The average location of weight for an object.
Center of Rotation The midpoint of a line between the center of the drive wheel hubs about
which the AMR will rotate.
Charging Station System that is used to charge an AMR battery that is comprised of the
Power Supply Box, the Docking Target, and the cable between these
items.
Coordinate System The X, Y, Z, and theta reference system relating the AMR to its environ-
ment and to the relative position of other devices.
Docking Target A fixed object that is connected to the Power Supply Box that the AMR
docks to that is used for autonomous charging.
Dongle A small hardware device that contains the credentials (e.g., license key) re-
quired to run a specific program. A dongle is used in each AMR to enable
the use of the ARAM software.
Dropoff A job segment typically used where the payload is transferred from the
AMR to the goal.
E-STOP Emergency stop button.
Emergency stop A function that overrides an AMR's controls and brings it to a rapid stop for
safety purposes.
Encoder A sensor on each drive motor of the AMR that is used to collect and trans-
mit information about distance traveled and direction.
EM2100 A network appliance that acts as a Fleet Manager or Fleet Simulator.
Ethernet A type of network used in local area networks that typically uses a twisted
pair cable and supports data speeds up to 100 Mbps.
FA Factory Automation
Glossary
33
AMR (Autonomous Mobile Robot) MD-series Platform User's Manual (I681)
 Loading...
Loading...









